Credito:Kottege et al.
I robot a più gambe sono in grado di navigare in una varietà di terreni complessi e non strutturati. I loro numerosi gradi di libertà consentono loro di adattare la loro postura di deambulazione per navigare in diversi ambienti difficili, compresi gli spazi confinati.
Ciò nonostante, le piattaforme multi-gamba più popolari e comunemente utilizzate non possono eseguire questo adattamento in modo autonomo. Per ovviare a questa limitazione, ricercatori del CSIRO (Organizzazione della ricerca scientifica e industriale del Commonwealth), in collaborazione con ETH Zurigo, hanno recentemente ideato un nuovo approccio che consente ai robot con le gambe di cambiare autonomamente la forma del proprio corpo in base all'ambiente in cui operano.
"Abbiamo svolto ricerche sui robot con gambe e sviluppato i nostri robot con gambe negli ultimi otto anni, " Navinda Kottege, ricercatore capo del gruppo che ha condotto lo studio, ha detto a TechXplore. "Questi robot a più gambe hanno molti gradi di libertà (ad es. Weaver ha 30 articolazioni) che consente loro di assumere molte posizioni diverse quando camminano. Quando abbiamo schierato i nostri robot in ambienti complessi e ristretti come le miniere sotterranee, cavità del soffitto o sottopavimento, ci siamo resi conto che hanno bisogno di cambiare la configurazione delle gambe e del corpo (cioè la postura) per infilarsi negli spazi stretti, camminare su ostacoli alti o strisciare sotto strapiombi bassi. Questo requisito è ciò che ha spinto questa ricerca".
Credito:Kottege et al.
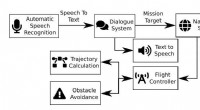
Il recente studio condotto da Kottege e dai suoi colleghi si ispira alla robotica morbida, proponendo un'astrazione deformabile del rettangolo di selezione del modello del robot, combinato con la mappatura e le strategie di pianificazione. Per la mappatura, i ricercatori hanno utilizzato mappe multi-elevazione incentrate sul robot generate tramite sensori di distanza montati sul robot. Per la pianificazione del percorso, hanno usato un algoritmo di ottimizzazione della traiettoria chiamato CHOMP, che possono creare traiettorie lisce evitando gli ostacoli.
"I sensori montati sul robot, in questo caso un sensore 3D basato su telecamera stereo, fornire una nuvola di punti 3D dell'ambiente circostante, " disse Kottege. "Essenzialmente, queste sono una serie di distanze dal robot a vari oggetti nell'ambiente circostante. Queste informazioni geometriche vengono convertite in una mappa multi-elevazione in cui vengono identificati pavimenti e soffitti, informare il robot dello spazio che deve attraversare."
L'approccio ideato da Kottege e dai suoi colleghi modella un robot come un riquadro di delimitazione deformabile, che può essere deformato entro i suoi specifici limiti di giunzione, per adattarsi a spazi ristretti. I ricercatori hanno anche sviluppato una serie di algoritmi che consentono a questa rappresentazione del riquadro di delimitazione deformato di mappare un insieme di angoli di giunzione, che vengono poi alimentati al robot, permettendogli di adattare autonomamente la sua postura mentre naviga attraverso gli spazi ristretti.

Credito:Kottege et al.
"I metodi che abbiamo sviluppato non sono legati a un particolare sensore o a un particolare robot con le gambe, " ha spiegato Kottege. "Questi risultati possono essere applicati ai dati provenienti da qualsiasi sensore che fornisce una nuvola di punti 3D dell'ambiente (ad esempio Lidar, telecamere ToF) e qualsiasi robot con sufficienti gradi di libertà da consentirne la modellazione come un riquadro di delimitazione deformabile. L'applicazione di questi risultati può dare ai futuri robot la capacità di adattare efficacemente le loro posture in applicazioni del mondo reale come la ricerca e il salvataggio in una miniera crollata o all'indomani di un terremoto per attraversare spazi ristretti difficili e complessi e raggiungere i sopravvissuti in tempo".
I ricercatori hanno implementato e valutato il metodo proposto sia nelle simulazioni che sul robot esapode Weaver di CSIRO, che è alto 33 centimetri e largo 82 centimetri, quando si cammina normalmente. Sono stati in grado di raggiungere la navigazione sotto i 25 centimetri di ostacoli a strapiombo, attraverso spazi larghi 70 centimetri e ostacoli alti oltre 22 centimetri, sia in spazi di prova artificiali che in ambienti realistici, come un tunnel minerario sotterraneo. Nel futuro, il loro modello potrebbe essere applicato a robot con le gambe che devono operare nelle miniere, siti di costruzione, edifici danneggiati, e altri ambienti difficili.
"Ora continueremo a lavorare allo sviluppo di robot con gambe robusti ed efficienti in grado di operare in ambienti reali complessi mirando ad applicazioni come ricerca e soccorso, soprattutto in ambienti sotterranei senza copertura GPS, " ha detto Kottege. "Questa è un'area di lavoro ricca di problemi di ricerca che vanno dalla progettazione di meccanismi, rilevamento e percezione del robot per la localizzazione e la navigazione per citarne alcuni."
© 2019 Scienza X Rete