Credito:Heriot-Watt University
Scienziati dell'Università Heriot-Watt, in collaborazione con l'ente del settore ferroviario RSSB, stanno sviluppando soluzioni robotiche per migliorare la pulizia dei vagoni ferroviari in luoghi difficili da raggiungere e per facilitare l'ispezione più ravvicinata degli archi dei ponti ferroviari.
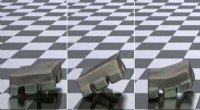
Il primo progetto svilupperà piattaforme mobili di ispezione robotizzate in grado di operare tra e sotto i sedili di un vagone ferroviario. In grado di navigare e manipolare se stessi in spazi di lavoro ristretti, le piattaforme robot puliranno e rileveranno i pericoli utilizzando un algoritmo innovativo.
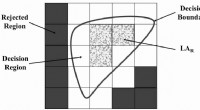
Il Dr. Mustafa Suphi Erden della School of Engineering and Physical Sciences sta conducendo la ricerca. Ha detto:"Inizialmente il nostro lavoro si concentrerà sullo sviluppo di una piattaforma mobile robotica in grado di navigare autonomamente nello spazio ristretto tra e sotto i sedili di un vagone ferroviario. Quindi svilupperemo un algoritmo per rilevare la pulizia e le situazioni pericolose utilizzando un set dettagliato di immagini di vagoni ferroviari.
"Creeremo anche un manipolatore da integrare con la piattaforma mobile per raccogliere oggetti predefiniti regolarmente lasciati o scartati dai passeggeri del treno come bottiglie, bicchieri di carta, giornali, e anche oggetti biologicamente pericolosi come lame, aghi, e gli iniettori lasciati dai passeggeri".
Il secondo progetto svilupperà la tecnologia dei droni autonomi per ispezionare gli archi dei ponti ferroviari, in particolare la curva interna dove l'accesso è limitato.
I droni raccoglieranno autonomamente le immagini sotto gli archi e poi le analizzeranno automaticamente per rilevare difetti nella struttura. Difetti come crepe, scheggiature (fiocchi), infiltrazioni d'acqua, malta insufficiente, disallineamento, e schiacciamento saranno esaminati e identificati per il lavoro correttivo.
Il Dr. Mustafa Suphi Erden spiega come funzionerebbe il drone:"Un essere umano porterà il drone a un bordo iniziale dell'arco dove inizierà quindi a volare automaticamente lungo la superficie dell'arco scansionando attraverso la superficie dell'arco e raccogliendo immagini. Le immagini raccolte verranno quindi elaborati per rilevare i difetti e allertare gli esperti di manutenzione in modo da poter intraprendere rapidamente azioni correttive.Il nostro lavoro si concentrerà inizialmente sullo sviluppo della tecnologia dei droni in grado di navigare da soli utilizzando sensori di prossimità e webcam.
"Questi consentiranno al drone di controllarsi da un bordo dell'arco all'altro attraverso una linea orizzontale e tornare indietro per seguire un percorso parallelo su un'altra linea orizzontale. Questo livello di precisione, compreso il mantenimento di una distanza precisa dalla superficie dell'arco, significa che ogni pollice dell'arco sarà ispezionato in dettaglio. Quindi svilupperemo un algoritmo di apprendimento automatico per ispezionare le immagini raccolte e rilevare una serie di pericoli pre-identificati nella muratura dei ponti".
RSSB sta finanziando due dottorati di ricerca quadriennali. borse di studio nell'ambito del Centro di Dottorato di Ricerca in Robotica e Sistemi Autonomi.
Giulia Lorenzini, Il Senior Partnerships and Grants Manager di RSSB ha dichiarato:"L'industria ferroviaria sta appena iniziando a comprendere ciò che le applicazioni Robotics and Autonomous Systems (RAS) hanno da offrire. È fantastico lavorare con un istituto di ricerca leader nel settore in modo che il nostro i membri delle ferrovie possono vedere le prove del potenziale della tecnologia in un funzionamento, modo pratico."