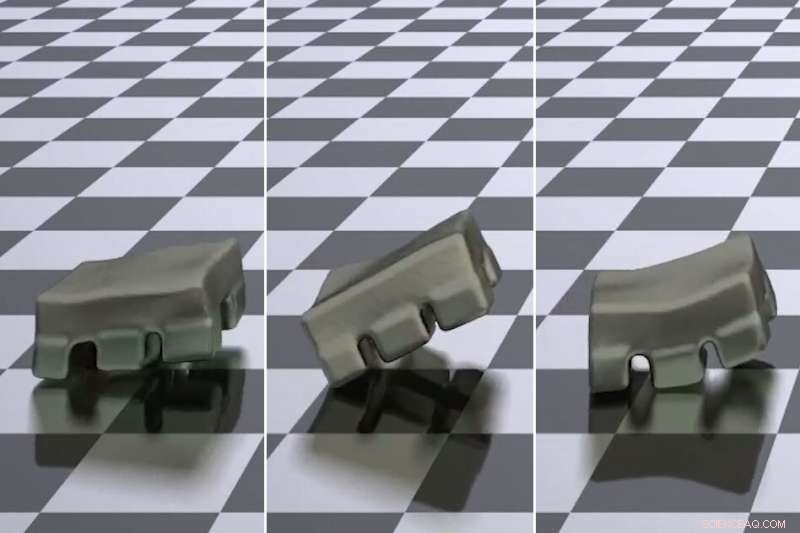
Un modello inventato dal MIT ottimizza in modo efficiente e simultaneo il controllo e la progettazione di robot morbidi per compiti mirati, che è stata tradizionalmente un'impresa monumentale nel calcolo. Il modello, ad esempio, era significativamente più veloce e più accurato dei metodi all'avanguardia nel simulare come i robot quadrupedi (nella foto) dovrebbero muoversi per raggiungere le destinazioni target. Credito:Andrew Spielberg, Daniela Rus, Wojciech Matusik, Allan Zhao, Tao Du, e Yuanming Hu
I ricercatori del MIT hanno inventato un modo per ottimizzare in modo efficiente il controllo e la progettazione di robot morbidi per compiti mirati, che è stata tradizionalmente un'impresa monumentale nel calcolo.
I robot morbidi sono elastici, flessibile, corpi elastici che possono essenzialmente muoversi in un numero infinito di modi in un dato momento. Computazionalmente, si tratta di una "rappresentazione di stato" molto complessa, " che descrive come si muove ogni parte del robot. Le rappresentazioni di stato per i robot morbidi possono avere potenzialmente milioni di dimensioni, rendendo difficile calcolare il modo ottimale per far completare a un robot compiti complessi.
Alla conferenza sui sistemi di elaborazione delle informazioni neurali il mese prossimo, i ricercatori del MIT presenteranno un modello che apprende un compatto, o "basso dimensionale, "ancora dettagliata rappresentazione dello Stato, basato sulla fisica sottostante del robot e del suo ambiente, tra gli altri fattori. Ciò aiuta il modello a co-ottimizzare in modo iterativo il controllo del movimento e i parametri di progettazione dei materiali adatti a compiti specifici.
"I robot morbidi sono creature di dimensioni infinite che si piegano in un miliardo di modi diversi in un dato momento, " dice il primo autore Andrew Spielberg, uno studente laureato nel Laboratorio di Informatica e Intelligenza Artificiale (CSAIL). "Ma, in verità, ci sono modi naturali in cui gli oggetti morbidi possono piegarsi. Troviamo che gli stati naturali dei robot morbidi possono essere descritti in modo molto compatto in una descrizione a bassa dimensione. Ottimizziamo il controllo e la progettazione di robot morbidi imparando una buona descrizione degli stati probabili".
Nelle simulazioni, il modello ha consentito ai robot morbidi 2D e 3D di completare attività, come lo spostamento di determinate distanze o il raggiungimento di un punto target, in modo più rapido e accurato rispetto agli attuali metodi all'avanguardia. I ricercatori hanno in programma di implementare il modello in veri robot morbidi.
Insieme a Spielberg sulla carta ci sono studenti laureati CSAIL Allan Zhao, Tao Du, e Yuanming Hu; Daniela Rus, direttore del CSAIL e Andrea ed Erna Viterbi Professore di Ingegneria Elettrica e Informatica; e Wojciech Matusik, un professore associato del MIT in ingegneria elettrica e informatica e capo del Computational Fabrication Group.
"Apprendimento in loop"
La robotica morbida è un campo di ricerca relativamente nuovo, ma è promettente per la robotica avanzata. Ad esempio, corpi flessibili potrebbero offrire un'interazione più sicura con gli esseri umani, migliore manipolazione degli oggetti, e più manovrabilità, tra gli altri vantaggi.
Il controllo dei robot nelle simulazioni si basa su un "osservatore, " un programma che calcola le variabili che vedono come si muove il robot morbido per completare un compito. Nel lavoro precedente, i ricercatori hanno scomposto il robot morbido in grappoli disegnati a mano di particelle simulate. Le particelle contengono informazioni importanti che aiutano a restringere i possibili movimenti del robot. Se un robot tenta di piegarsi in un certo modo, ad esempio, gli attuatori possono resistere a quel movimento abbastanza da poter essere ignorato. Ma, per robot così complessi, scegliere manualmente quali cluster monitorare durante le simulazioni può essere complicato.
Basandosi su quel lavoro, i ricercatori hanno progettato un metodo di "ottimizzazione dell'apprendimento in the loop", dove tutti i parametri ottimizzati vengono appresi durante un singolo ciclo di feedback su molte simulazioni. E, contemporaneamente all'ottimizzazione dell'apprendimento, o "in the loop", il metodo apprende anche la rappresentazione dello stato.
Il modello utilizza una tecnica chiamata metodo del punto materiale (MPM), che simula il comportamento di particelle di materiali continui, come schiume e liquidi, circondato da una griglia di sfondo. Così facendo, cattura le particelle del robot e il suo ambiente osservabile in pixel o pixel 3D, conosciuti come voxel, senza bisogno di ulteriori calcoli.
In una fase di apprendimento, queste informazioni sulla griglia di particelle grezze vengono inserite in un componente di apprendimento automatico che impara a inserire un'immagine, comprimerlo in una rappresentazione a bassa dimensione, e decomprimere la rappresentazione nell'immagine di input. Se questo "autoencoder" mantiene dettagli sufficienti durante la compressione dell'immagine in ingresso, può ricreare accuratamente l'immagine di input dalla compressione.
Nel lavoro dei ricercatori, le rappresentazioni compresse apprese dell'autoencoder servono come rappresentazione dello stato a bassa dimensione del robot. In una fase di ottimizzazione, quella rappresentazione compressa torna indietro nel controller, che emette un'attuazione calcolata per il modo in cui ciascuna particella del robot dovrebbe muoversi nel successivo passaggio simulato da MPM.
Contemporaneamente, il controller utilizza tali informazioni per regolare la rigidità ottimale di ogni particella per ottenere il movimento desiderato. Nel futuro, che le informazioni sui materiali possono essere utili per i robot morbidi per la stampa 3D, dove ogni macchia di particella può essere stampata con una rigidità leggermente diversa. "Ciò consente di creare progetti di robot adatti ai movimenti del robot che saranno rilevanti per compiti specifici, " dice Spielberg. "Imparando insieme questi parametri, mantieni tutto il più sincronizzato possibile per rendere più semplice il processo di progettazione."
Ottimizzazione più rapida
Tutte le informazioni di ottimizzazione sono, a sua volta, reinserito all'inizio del ciclo per addestrare l'autoencoder. Attraverso molte simulazioni, il controller apprende il movimento ottimale e il design del materiale, mentre l'autoencoder apprende la rappresentazione dello stato sempre più dettagliata. "La chiave è che vogliamo che lo stato a bassa dimensione sia molto descrittivo, "dice Spielberg.
Dopo che il robot raggiunge lo stato finale simulato in un determinato periodo di tempo, ad esempio, il più vicino possibile alla destinazione di destinazione:aggiorna una "funzione di perdita". Questa è una componente fondamentale dell'apprendimento automatico, che cerca di minimizzare qualche errore. In questo caso, si minimizza, dire, quanto lontano il robot si è fermato dal bersaglio. Quella funzione di perdita ritorna al controller, che utilizza il segnale di errore per mettere a punto tutti i parametri ottimizzati per completare al meglio l'attività.
Se i ricercatori tentassero di alimentare direttamente tutte le particelle grezze della simulazione nel controller, senza la fase di compressione, "il tempo di esecuzione e di ottimizzazione esploderebbe, " dice Spielberg. Usando la rappresentazione compressa, i ricercatori sono stati in grado di ridurre il tempo di esecuzione per ogni iterazione di ottimizzazione da alcuni minuti fino a circa 10 secondi.
I ricercatori hanno convalidato il loro modello su simulazioni di vari robot bipedi e quadrupedi 2-D e 3-D. I ricercatori hanno anche scoperto che, while robots using traditional methods can take up to 30, 000 simulations to optimize these parameters, robots trained on their model took only about 400 simulations.
Deploying the model into real soft robots means tackling issues with real-world noise and uncertainty that may decrease the model's efficiency and accuracy. Ma, nel futuro, the researchers hope to design a full pipeline, from simulation to fabrication, for soft robots.