I ricercatori del MIT e altrove hanno sviluppato robot computazionalmente semplici che si collegano in grandi gruppi per muoversi, trasportare oggetti, e completare altri compiti. Attestazione:Felice Frankel
Prendendo spunto dalle cellule biologiche, ricercatori del MIT, Università della Columbia, e altrove hanno sviluppato robot computazionalmente semplici che si connettono in grandi gruppi per muoversi, trasportare oggetti, e completare altri compiti.
Questo cosiddetto sistema di "robotica delle particelle", basato su un progetto del MIT, Ingegneria della Colombia, Università Cornell, e ricercatori dell'Università di Harvard, comprende molte singole unità a forma di disco giustamente chiamate "particelle". Le particelle sono collegate liberamente da magneti attorno ai loro perimetri. Ogni particella può fare solo due cose:espandersi e contrarsi. Ma quel movimento, quando accuratamente programmato, consente alle singole particelle di spingersi e tirarsi l'un l'altra in un movimento coordinato. I sensori di bordo consentono al cluster di gravitare verso le sorgenti luminose.
In un Natura carta, i ricercatori dimostrano un cluster di due dozzine di particelle robotiche reali e una simulazione virtuale fino a 100, 000 particelle che si muovono attraverso gli ostacoli verso una lampadina. Mostrano anche che un robot particellare può trasportare oggetti posti al suo interno.
I robot di particelle possono formare molte configurazioni e navigare in modo fluido intorno agli ostacoli e passare attraverso spazi ristretti. In particolare, nessuna delle particelle comunica direttamente o dipende l'una dall'altra per funzionare, così le particelle possono essere aggiunte o sottratte senza alcun impatto sul gruppo. Nella loro carta, i ricercatori mostrano che i sistemi robotici di particelle possono completare le attività anche quando molte unità non funzionano correttamente.
Il paper rappresenta un nuovo modo di pensare ai robot, che sono tradizionalmente progettati per uno scopo, comprende molte parti complesse, e smettono di funzionare in caso di malfunzionamento di qualsiasi parte. Robot costituiti da questi componenti semplicistici, dicono i ricercatori, potrebbe consentire una maggiore scalabilità, flessibile, e sistemi robusti.
"Abbiamo piccole cellule robotiche che non sono così capaci come individui ma possono fare molto come gruppo, "dice Daniela Rus, direttore del Laboratorio di Informatica e Intelligenza Artificiale (CSAIL) e Andrea ed Erna Viterbi Professore di Ingegneria Elettrica e Informatica. "Il robot di per sé è statico, ma quando si connette con altre particelle robot, all'improvviso il collettivo di robot può esplorare il mondo e controllare azioni più complesse. Con queste 'cellule universali, ' le particelle del robot possono raggiungere forme diverse, trasformazione globale, movimento globale, comportamento globale, e, come abbiamo mostrato nei nostri esperimenti, seguire i gradienti di luce. Questo è molto potente".
Insieme a Rus sul giornale ci sono:il primo autore Shuguang Li, un postdoc CSAIL; co-primo autore Richa Batra e autore corrispondente Hod Lipson, entrambi della Columbia Engineering; David Brown, Hyun Dong Chang, e Nikhil Ranganathan di Cornell; e Chuck Hoberman di Harvard.
Al MIT, Rus ha lavorato su modulari, robot connessi da quasi 20 anni, incluso un robot cubo in espansione e in contrazione che potrebbe connettersi ad altri per muoversi. Ma la forma quadrata limitava il movimento e le configurazioni del gruppo dei robot.
In collaborazione con il laboratorio di Lipson, dove Li era uno studente laureato fino a quando è arrivato al MIT nel 2014, i ricercatori hanno optato per meccanismi a forma di disco che possono ruotare l'uno intorno all'altro. Possono anche connettersi e disconnettersi l'uno dall'altro, e formare in molte configurazioni.
Ogni unità di un robot particellare ha una base cilindrica, che ospita una batteria, un piccolo motore, sensori che rilevano l'intensità della luce, un microcontrollore, e un componente di comunicazione che invia e riceve segnali. Sopra è montato un giocattolo per bambini chiamato Hoberman Flight Ring - il suo inventore è uno dei coautori dell'articolo - che consiste in piccoli pannelli collegati in una formazione circolare che possono essere tirati per espandersi e spinti indietro per contrarsi. In ogni pannello sono installati due piccoli magneti.
Il trucco era programmare le particelle robotiche per espandersi e contrarsi in una sequenza esatta per spingere e tirare l'intero gruppo verso una fonte di luce di destinazione. Fare così, i ricercatori hanno dotato ogni particella di un algoritmo che analizza le informazioni trasmesse sull'intensità della luce da ogni altra particella, senza la necessità di comunicazione diretta particella-particella.
I sensori di una particella rilevano l'intensità della luce proveniente da una sorgente luminosa; più la particella è vicina alla sorgente luminosa, maggiore è l'intensità. Ogni particella trasmette costantemente un segnale che condivide il suo livello di intensità percepito con tutte le altre particelle. Supponiamo che un sistema robotico di particelle misuri l'intensità della luce su una scala da 1 a 10:le particelle più vicine alla luce registrano un livello 10 e quelle più lontane registreranno il livello 1. Il livello di intensità, a sua volta, corrisponde a un tempo specifico in cui la particella deve espandersi. Le particelle che sperimentano la massima intensità, il livello 10, si espandono per prime. Quando queste particelle si contraggono, le particelle successive in ordine, livello 9, quindi espandere. Quel movimento di espansione e contrazione a tempo avviene ad ogni livello successivo.
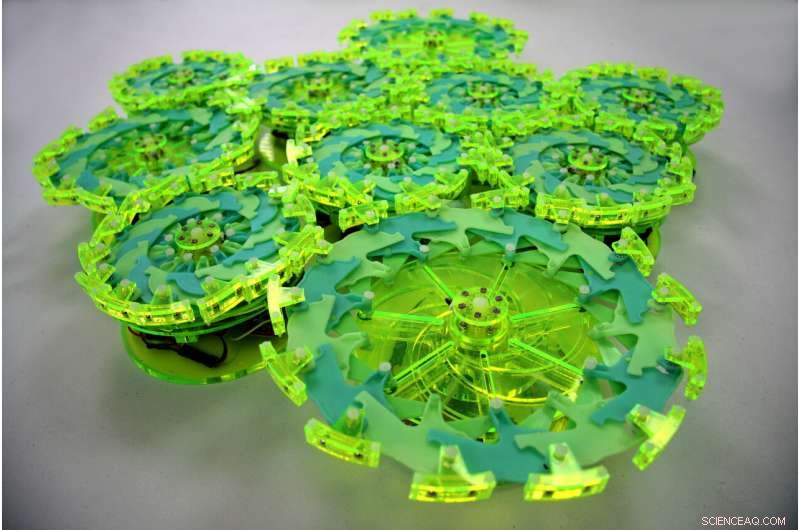
I robot di particelle sono composti da componenti accoppiati in modo lasco, o particelle, che mancano di un'identità individuale o di una posizione indirizzabile. Sono capaci solo di un semplice movimento:espansione e contrazione. Però, quando un gruppo di particelle è coordinato per muoversi come un collettivo, si osserva un comportamento interessante. Anche in configurazioni amorfe, i robot particellari sfruttano i fenomeni della meccanica statistica per produrre la locomozione. Credito:Shuguang Li/Columbia Engineering
"Questo crea un'onda meccanica di espansione-contrazione, un movimento coordinato di spinta e trascinamento, che sposta un grande cluster verso o lontano da stimoli ambientali, " dice Li. Il componente chiave, Li aggiunge, è il tempo preciso di un orologio sincronizzato condiviso tra le particelle che consente il movimento nel modo più efficiente possibile:"Se sbagli l'orologio sincronizzato, il sistema funzionerà in modo meno efficiente."
Nei video, i ricercatori dimostrano un sistema robotico di particelle che comprende particelle reali che si muovono e cambiano direzione verso diverse lampadine mentre vengono accese, e facendosi strada attraverso un divario tra gli ostacoli. Nella loro carta, i ricercatori mostrano anche che i cluster simulati fino a 10, 000 particelle mantengono la locomozione, a metà della loro velocità, anche con un massimo del 20 percento di unità non riuscite.
"È un po' come il proverbiale 'grey goo, '" dice Lipson, professore di ingegneria meccanica alla Columbia Engineering, facendo riferimento al concetto fantascientifico di un robot autoreplicante che comprende miliardi di nanobot. "La novità principale qui è che hai un nuovo tipo di robot che non ha un controllo centralizzato, nessun singolo punto di errore, nessuna forma fissa, e i suoi componenti non hanno un'identità univoca."
Il prossimo passo, Lipson aggiunge, sta miniaturizzare i componenti per realizzare un robot composto da milioni di particelle microscopiche.