Credito:Laboratorio di informatica e intelligenza artificiale
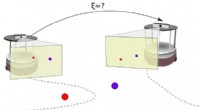
Se guardi questo robot pick and place capisci subito perché è un grosso problema, non tanto per la destrezza e il movimento fine, anche se il robot segna in entrambi, ma solo perché è così intelligente.
È abbastanza ovvio dalle notizie che escono dai laboratori universitari che braccia e mani robotiche progettate per la raccolta e lo smistamento sono un argomento frequente; ricercatori ambiziosi cercano di ottenere punteggi più alti per soluzioni efficienti.
Come ha affermato il MIT CSAIL, "per tutti i progressi che abbiamo fatto con i robot, hanno ancora a malapena le capacità di un bambino di due anni. I robot di fabbrica possono raccogliere lo stesso oggetto più e più volte, e alcuni possono anche fare alcune distinzioni di base tra gli oggetti, ma generalmente hanno difficoltà a comprendere un'ampia gamma di forme e dimensioni degli oggetti, o essere in grado di spostare detti oggetti in diverse pose o posizioni."
Il ronzio di questa settimana è tutto su questo robot, con il suo stile "keypoints" in primo piano per raggiungere un livello di coordinamento più avanzato. Hanno esplorato un nuovo modo di identificarsi e muoversi intere classi di oggetti, rappresentandoli come gruppi di punti chiave 3-D.
L'ingegnere citato professore del MIT Russ Tedrake, autore senior del documento che descrive il loro lavoro e su arXiv. "I robot possono raccogliere quasi tutto, ma se è un oggetto che non hanno mai visto prima, non possono effettivamente metterlo giù in alcun modo significativo."
L'ingegnere ha dato il suo cenno a un approccio che suonava come "un tipo di tabella di marcia visiva che consente una manipolazione più sfumata".
Puoi vedere il robot in azione in un video di anteprima di kPAM, "Manipolazione precisa del robot con oggetti mai visti prima." Cos'è kpam? Questo sta per Keypoint Affordances for Robotic Level Manipulation. Il robot ottiene tutte le informazioni di cui ha bisogno per raccogliere, spostare e posizionare oggetti.
"Capire solo un po' di più sull'oggetto - la posizione di alcuni punti chiave - è sufficiente per consentire un'ampia gamma di utili attività di manipolazione, ", ha affermato il professore del MIT Russ Tedrake.
Un documento che descrive il loro lavoro, che è su arXiv, è intitolato "kPAM:KeyPoint Affordances for Category-Level Robotic Manipulation, " di Lucas Manuelli, Wei Gao, Peter Florence e Russ Tedrake. Sono con CSAIL (Computer Science and Artificial Intelligence Laboratory) del Massachusetts Institute of Technology.
Ecco cosa hanno detto gli autori dell'articolo su come il loro approccio sia un passo fuori dalle "condutture di manipolazione" esistenti. Quest'ultimo in genere specifica la configurazione desiderata come posa 6-DOF di destinazione, che ha i suoi limiti. La rappresentazione di un oggetto "con una trasformazione parametrizzata definita su un modello fisso non può catturare grandi variazioni di forma all'interno della categoria, e specificare una posa target a livello di categoria può essere fisicamente irrealizzabile o non riuscire a portare a termine il compito."
Conoscere la posa e le dimensioni di una tazza da caffè rispetto a una tazza canonica è ok, ma non è sufficiente appenderlo a una rastrelliera per la maniglia. Il loro approccio utilizza "punti chiave 3D semantici come rappresentazione dell'oggetto". Quali furono i risultati della loro esplorazione? Il loro metodo è stato in grado di gestire "grandi variazioni all'interno della categoria senza alcuna messa a punto o specifica a livello di istanza".
Il team ha riferito che "Esperimenti hardware estesi dimostrano che il nostro metodo può svolgere in modo affidabile compiti con oggetti mai visti prima in una categoria, come posizionare scarpe e tazze con variazioni di forma significative nelle configurazioni target a livello di categoria."
© 2019 Scienza X Rete