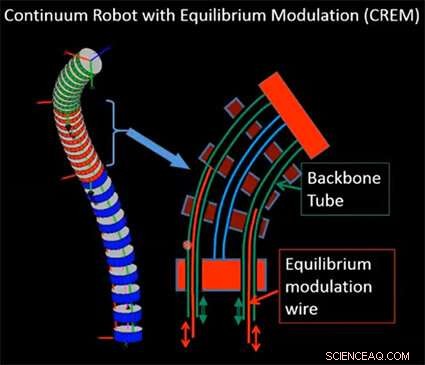
Potenziamento di una macroscala esistente, robot multi-spina dorsale con capacità di movimento su scala micron si ottiene aggiungendo fili (rossi) all'interno della struttura che possono scorrere dentro e fuori dalle dorsali tubolari. Ciò consente la modulazione della forma di equilibrio. Il robot ottiene ancora un movimento su larga scala (macro) utilizzando le dorsali secondarie tubolari fissate rigidamente al disco rosso superiore. Per azionamento diretto, spingendoli e tirandoli, la configurazione del robot continuo cambia. Credito:Vanderbilt University
Un nuovo robot continuo progettato dagli ingegneri Vanderbilt raggiunge un movimento multiscala e potrebbe aprire un enorme mondo di microchirurgia complessa precedentemente impossibile.
Il robot è in grado di fornire sia un ampio spazio di lavoro di macromovimenti, se necessario per l'intervento chirurgico, sia uno spazio di lavoro di piccoli micromovimenti con risoluzioni di movimento di 1 micron o meno. Per un senso di scala, un pollice contiene 25, 400 micron. Un globulo rosso umano è largo circa otto micron, le stesse dimensioni di alcuni batteri e significativamente più piccole della larghezza dei capelli umani medi.
"Il nostro design raggiunge risoluzioni di movimento di 1 micron o meno utilizzando attuatori economici. Questa riconfigurazione, con un costo aggiuntivo minimo, potrebbe accelerare lo sviluppo di una nuova classe di robot chirurgici in grado di eseguire sia il macromovimento per l'intervento chirurgico sia il movimento su microscala per imaging o intervento a livello cellulare, "ha detto Nabil Simaan, professore di ingegneria meccanica e direttore dell'Advanced Robotics and Mechanism Applications Laboratory.
"Questo espande notevolmente le capacità della robotica nella chirurgia mininvasiva, " Egli ha detto.
La miniaturizzazione e il range di movimento consentirebbero un controllo preciso durante le procedure su aneurismi complessi, minuscole vene e arterie, nervi e le delicate strutture dell'occhio, l'orecchio interno e le corde vocali. Le potenziali applicazioni includono biopsie, eradicazione del tumore e rilascio mirato di farmaci a livello cellulare.
Simaan e il suo team hanno adattato l'architettura flessibile del suo precedente robot continuo per eseguire su macro e micro scala alterando la posa di equilibrio del robot, che Simaan chiama robot continui con modulazione dell'equilibrio, o CREMA.
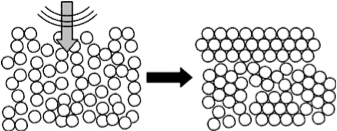
L'architettura flessibile dei precedenti robot continui ha ottenuto un movimento simile a un verme per la macromanipolazione. Il robot è segmentato con dischi o anelli come il corpo di un lombrico. Ogni disco è unito da minuscole spine dorsali, o tubi di azionamento. Aggiungendo piccoli fili elastici all'interno dei tubi di azionamento e spostando i fili su o giù, l'equilibrio statico delle piastre cambia, creare movimento su scala micrometrica.
"Questa nuova classe di robot fornirà micro-precisione durante l'attraversamento di percorsi sinuosi su macroscala verso il sito dell'operazione. I potenziali vantaggi includono la ricostruzione esatta dei tessuti e la completa eradicazione chirurgica dei tumori, " disse Siman, un affiliato del Vanderbilt Institute for Surgery and Engineering.
Il robot utilizza dorsali secondarie tubolari per ottenere la grande scala di movimento. Spingendoli e tirandoli, la configurazione del robot continuo cambia. L'aggiunta di fili che possono scorrere dentro e fuori le spine dorsali tubolari ha permesso al team di ricerca di modulare la forma di equilibrio.
Inoltre, sono in corso test approfonditi per l'incorporazione della tomografia a coerenza ottica, che è effettivamente un "ecografia ottica" che consente riflessi di imaging dall'interno del tessuto.
Simaan e i suoi colleghi, dottorando in ingegneria meccanica Giuseppe Del Giudice, Professore assistente di ricerca di oftalmologia e scienze visive Jin-Hui Shen e il medico Karen M. Joos, Joseph N. e Barbara H. Ellis Family Professor di oftalmologia, hanno realizzato un'integrazione preliminare di una sonda OCT su misura.
Il particolare interesse di ricerca di Joos è l'uso di sonde OCT in miniatura con strumenti chirurgici robotici per migliorare la visualizzazione delle procedure all'interno dell'occhio. L'expertise di Del Giudice è nella progettazione e controllo di robot medici a microcontinuum, specificatamente la micromanipolazione per la chirurgia oftalmica.
L'estensione delle capacità di un robot continuo standard in termini di movimento e targeting su microscala potrebbe avere un impatto profondo nella microchirurgia fornendo una destrezza significativamente maggiore, controllabilità e precisione per i chirurghi o anche il pionieristico di procedure precedentemente impossibili, ha detto Simaan.