Foto a sinistra:pratica incarnata nel RAD Lab guidato da Riley Watts (al centro); foto di Catie Cuan. Foto a destra:pratica artistica nel RAD Lab attraverso una performance di "Time to Compile" alla Brown University Credit:Keira Heu-Jwyn Chang.
La ricercatrice dell'Università dell'Illinois Amy LaViers ha introdotto un nuovo punto di vista da cui osservare le capacità robotiche nel suo articolo, "Conti di Meccanica, Configurazioni esterne rispetto a quelle computazionali, Configurazioni interne in sistemi naturali e artificiali, " pubblicato oggi in PLOS UNO , una delle principali riviste di ricerca interdisciplinare.
LaViers guida la Robotica, Automazione, e Danza (RAD) Lab, specializzata nello sviluppo di sistemi robotici espressivi. Tipicamente, i robot mirano a replicare una qualche forma di movimento o azione naturale. Nelle impostazioni del settore come la produzione o l'inventario di magazzino, i robot hanno in genere prestazioni di gran lunga migliori con una maggiore precisione, precisione, e costi inferiori nel tempo. In situazioni più dinamiche, invece, i sistemi naturali hanno maggiori probabilità di superare un robot. L'esecuzione di compiti controllati, Per esempio, molto di quello che si vede in un magazzino, può essere facilmente quantificato, ma quando si tratta di situazioni più complesse non c'è stato un buon modo per farlo. L'articolo di LaViers introduce un modello di conteggio semplificato che offre una prospettiva numerica per confrontare le capacità espressive dei robot e degli esseri naturali. Questo è un argomento che viene esplorato nel RAD Lab attraverso la collaborazione interdisciplinare con artisti e pratica somatica.
Nell'informatica ci sono molte variabili che entrano nella potenza di un dispositivo, ma un modo comune di modellarlo utilizza il numero di transistor che ha il dispositivo. Col tempo, il numero di transistor è aumentato e così è aumentata la potenza di calcolo, una tendenza che viene spesso definita legge di Moore. È possibile tracciare un parallelo con i sistemi naturali tra i transistor "accesi" e "spenti" e un modello semplificato di neuroni:"scatto" e "non accensione". Un tale numero di transistor crea un collo di bottiglia statico per la capacità di calcolo dei computer, ignorando gli aspetti dinamici della velocità del processore, Per esempio. LaViers ha notato che un conteggio simile di configurazioni esterne statiche di robot potrebbe rivelare tendenze nella capacità robotica. Inoltre, ha collegato il calcolo e la meccanizzazione in un robot ai cambiamenti di stato interni ed esterni, rispettivamente, in un organismo naturale. Dopo aver fatto questi confronti, LaViers può confrontare direttamente l'espressività dei robot con gli organismi naturali, come mostrato nel grafico sottostante.
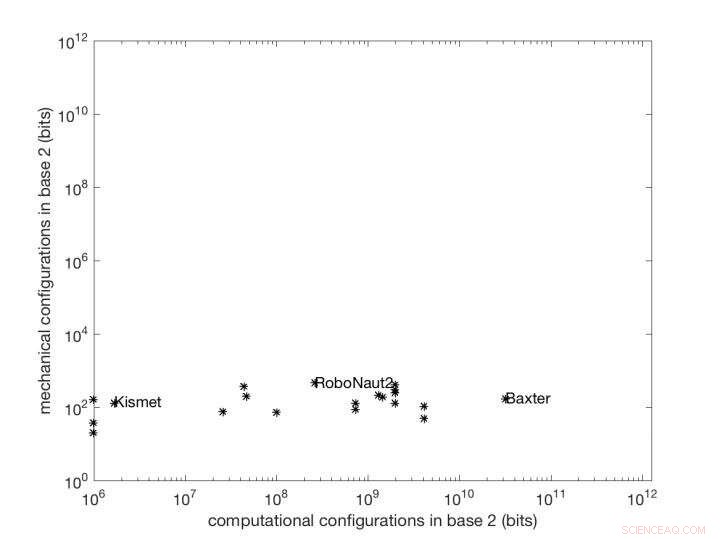
Trama dal lavoro appena pubblicato di LaViers:un confronto tra il cambiamento nella complessità interna rispetto a quella esterna dei robot negli ultimi 15 anni. Credito:University of Illinois Robotics, Laboratorio di Automazione e Danza (RAD)
Il suo articolo si concentra su due modelli di un verme microscopico (C. Elegans) e su diverse analisi parziali dell'organismo, nonché sull'analisi di una varietà di famosi robot moderni. Un grafico dei risultati di LaViers mostra che, usando il suo metodo, i robot si comportano principalmente tra i due modelli del worm per quanto sono espressivi. Questo è, un appropriato correlato naturale per l'espressività dei sistemi robotici esistenti potrebbe essere questo minuscolo verme. I confronti non sono perfetti, ma forniscono una semplificazione di un problema complesso per comprendere il quadro più ampio:quanti progressi possono essere fatti nel regno della robotica in situazioni dinamiche.
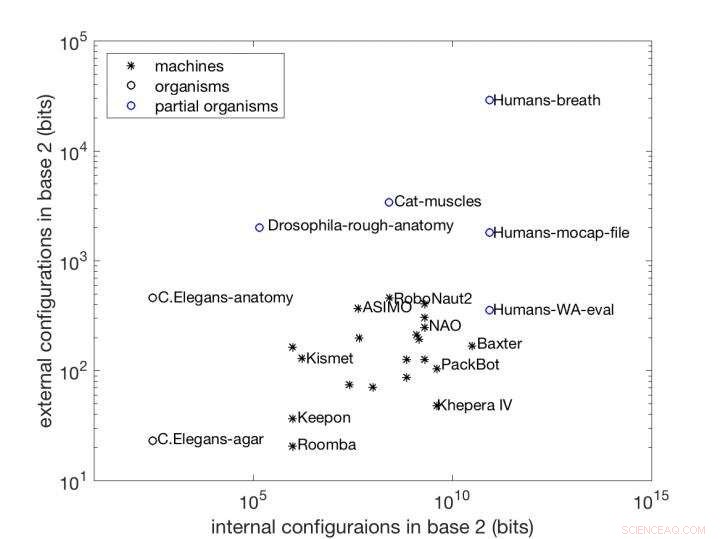
Un confronto dello stesso gruppo di robot con i sistemi naturali. Vedere la pubblicazione per i dettagli. Credito:University of Illinois Robotics, Automazione, e Danza (RAD) Lab
Nel campo della robotica, i vantaggi della natura a volte vengono trascurati. Il lavoro di LaViers contestualizza i progressi compiuti dai roboticisti nel corso degli anni. I robot sono diventati molto più avanzati, ma quando si tratta di vera imitazione della natura c'è ancora molto da fare. L'aspetto innovativo del suo lavoro attuale è che questo particolare modello di conteggio non è stato utilizzato prima nella robotica.
"Ciò di cui sono orgoglioso di questo documento è che le tendenze rivelate sono un po' scioccanti per le persone e ci è voluto molto tempo per essere pubblicate a causa di ciò, " LaViers ha detto. "I revisori in questa sede sono stati estremamente utili nel rendere la carta più forte. Alla fine, si spera che il lavoro indichi un modo di pensare ai sistemi artificiali rispetto a quelli naturali che possono aiutarci a migliorare i guasti e la robustezza delle macchine in ambienti dinamici. Questa è la direzione per il lavoro futuro".














