Un team di ricercatori dell'Harbin Institute of Technology in Cina e della Michigan State University negli Stati Uniti ha sviluppato un modo per controllare i microrobot sciami che sono in grado di assumere molteplici tipi di forme. Nel loro articolo pubblicato sulla rivista Robotica scientifica , il gruppo descrive i loro piccoli robot, cosa possono fare, e possibili usi per loro.
Negli ultimi decenni, scienziati e ingegneri hanno lavorato allo sviluppo di robot così piccoli da poter nuotare all'interno di un corpo vivente. Si crede che un giorno, tali robot saranno in grado di somministrare farmaci a bersagli nel corpo, o forse restare nel corpo, lavorando insieme al sistema immunitario per prevenire le malattie. In questo nuovo sforzo, i ricercatori hanno fatto un altro passo in quella direzione sviluppando un modo per controllare uno sciame di minuscoli robot che li configura in più tipi di forme.
I ricercatori osservano che fino ad ora, gli ingegneri hanno sviluppato minuscoli robot che formano e operano in sciami, ma solo in un'unica forma, limitando la loro utilità. I ricercatori che lavorano in Cina riferiscono che i loro minuscoli robot sono stati in grado di formare quattro diverse forme di sciame:liquido, nastro, catena e vortice. E ognuno di loro potrebbe essere formato su richiesta.
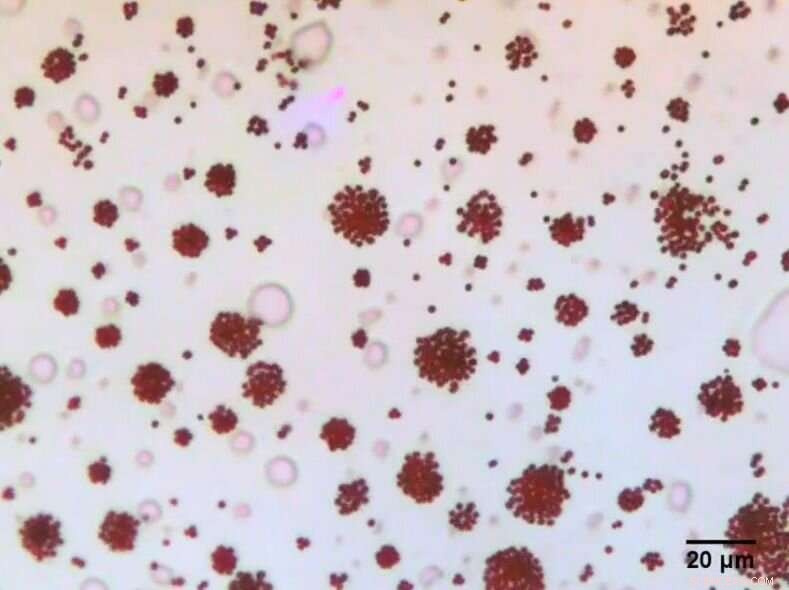
I robot negli esperimenti erano in realtà solo singoli granelli di ematite:erano sospesi in un liquido e manipolati usando magneti specializzati. Controllando la frequenza e la direzione del campo magnetico, i ricercatori sono stati in grado di far girare ogni robot, Rotolo, oscillare e ruzzolare indipendentemente. Quando il campo magnetico è stato controllato per un intero gruppo di robot, il risultato fu uno sciame controllabile.
I ricercatori sottolineano che per passare da una parte del corpo all'altra, uno sciame dovrebbe potersi plasmare in diverse configurazioni. Muovendosi attraverso un organo come lo stomaco, Per esempio, potrebbe richiedere che uno sciame si muova semplicemente come una massa. Muovendosi attraverso un canale, d'altra parte, richiederebbe forme come una catena, serpente o verme. E spostare il carico all'interno del corpo richiederebbe che uno sciame si unisca in una forma come un vortice per una presa collettiva.
© 2019 Scienza X Rete