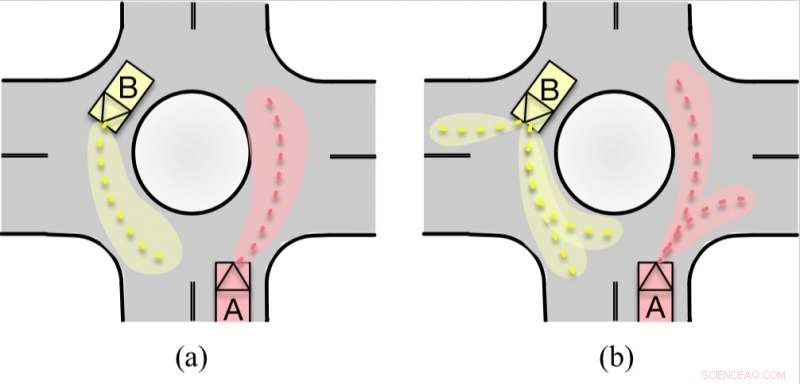
Dimostrazioni di (a) distribuzioni previste unimodali e (b) multimodali. Credito:Hu, Zhan &Tomizuka.
Ricercatori dell'Università della California (UC), Berkeley, hanno recentemente sviluppato un modello generativo in grado di prevedere i moti sequenziali di coppie di agenti interagenti, compresi i veicoli a guida autonoma e i veicoli con guida umana. Il loro metodo, delineato in un documento pre-pubblicato su arXiv, è interpretabile, il che significa che può spiegare la logica dietro le sue previsioni, portando ad una maggiore affidabilità e generalizzabilità.
"Affinché gli agenti autonomi operino con successo nel mondo reale, la capacità di anticipare i futuri movimenti delle entità circostanti nella scena può migliorare notevolmente i loro livelli di sicurezza, consentendo loro di evitare in anticipo situazioni pericolose, "Sì Hu, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore.
Gli studi precedenti hanno ottenuto risultati notevoli nella previsione del comportamento di singoli agenti o veicoli. Secondo Hu e i suoi colleghi, però, considerare questi agenti individualmente è spesso inutile e limitante, come nel mondo reale (ad esempio sulla strada), questi agenti tipicamente interagiscono tra loro ei loro stati sono quindi accoppiati. Inoltre, man mano che l'orizzonte previsto si espande, modellare le incertezze di previsione e le distribuzioni multimodali per le sequenze future diventa sempre più difficile.
"Nel nostro studio, abbiamo affrontato questa sfida presentando un approccio di previsione probabilistica multimodale, " Hu ha detto. "Il metodo proposto si basa su un modello generativo ed è in grado di prevedere congiuntamente i movimenti sequenziali di ciascuna coppia di agenti interagenti".
Come spiegato da Wei Zhan, un altro ricercatore coinvolto nello studio, questa previsione congiunta alla fine consente la previsione della reazione dei movimenti di altri agenti. Può fornire una risposta a domande "what if", come "Quali sarebbero le possibili reazioni degli altri se il veicolo autonomo ospite intraprendesse un'azione specifica in futuro?" La previsione della reazione è estremamente importante per i veicoli a guida autonoma in scenari di guida altamente interattivi.
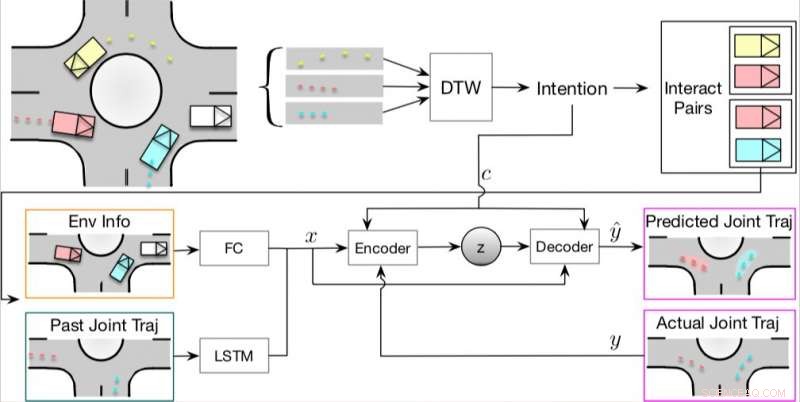
(a) La struttura complessiva del metodo proposto. (b) Mappa della rotatoria di tutti i percorsi di riferimento. Credito:Hu, Zhan &Tomizuka.
Il modello sviluppato da Hu e dai suoi colleghi si basa su un algoritmo chiave, che ha una struttura simile ai tradizionali autoencoder variazionali (VAE). Nel loro studio, i ricercatori hanno usato il loro modello per prevedere i comportamenti interattivi tra due veicoli, soprannominato A e B.
"La multimodalità può essere vista sia in aspetti discreti che continui, " Hu ha spiegato. "Ci possono essere molti discreti, intenzioni di alto livello che sono fissate nella mente di un essere umano, come svoltare a sinistra/destra o uscire in una determinata corsia nello scenario della rotatoria. Anche, sotto ogni intenzione, esistono diverse interazioni continue come diversi gradi di comportamento passa/rendimento. Perciò, è necessario affrontare la multimodalità quando prevediamo i comportamenti futuri di altri veicoli, che può portarci a risultati di previsione più accurati e ragionevoli."
I dati di movimento del mondo reale in scenari di guida altamente interattivi sono la risorsa più importante e il prerequisito per la ricerca sul comportamento e la previsione del movimento. I ricercatori hanno utilizzato una complessa rotonda a 7 direzioni con traffico intenso per raccogliere grandi quantità di dati di movimento altamente interattivi.
I dati raccolti sono stati utilizzati per addestrare e valutare il modello proposto, ottenendo risultati molto promettenti. Il loro approccio ha superato tre modelli alternativi comunemente usati per prevedere il movimento di agenti autonomi, vale a dire VAE condizionale, insieme di percettroni multistrato (MLP) e dropout di Monte Carlo (MC). Nel futuro, il loro laboratorio pubblicherà anche un set di dati di movimento più completo.
"Nel nostro recente lavoro, abbiamo mostrato il ragionamento alla base del processo di campionamento dei risultati previsti, " Hu ha detto. "Anche se c'è ancora molta strada da fare per comprendere appieno questi algoritmi a scatola nera (cioè le reti neurali), abbiamo cercato di fornire alcune informazioni significative su tale algoritmo a scatola nera e abbiamo cercato di rendere l'algoritmo proposto sicuro da usare. Se un giorno questi algoritmi di previsione verranno utilizzati in veicoli autonomi reali, sarà sicuramente necessario un ragionamento sufficiente dietro l'algoritmo di previsione."
Il modello ideato da Hu e dai suoi colleghi potrebbe aiutare a migliorare la sicurezza dei veicoli autonomi, consentendo loro di prevedere le interazioni tra altri veicoli sulla strada. Nei suoi studi successivi, Hu prevede di affrontare ulteriormente il lato sicurezza dell'algoritmo di previsione, cercando anche di rendere più trasparente il processo di previsione.
© 2019 Science X Network