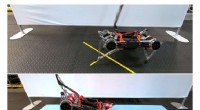
Un nuovo "simulatore di particelle" sviluppato dai ricercatori del MIT migliora le capacità dei robot di modellare materiali in forme target simulate e interagire con oggetti solidi e liquidi. Ciò potrebbe dare ai robot un tocco raffinato per applicazioni industriali o per la robotica personale, come modellare l'argilla o arrotolare il riso sushi appiccicoso. Credito:Massachusetts Institute of Technology
Un nuovo sistema di apprendimento sviluppato dai ricercatori del MIT migliora le capacità dei robot di modellare i materiali in forme target e fare previsioni sull'interazione con oggetti solidi e liquidi. Il sistema, noto come simulatore di particelle basato sull'apprendimento, potrebbe dare ai robot industriali un tocco più raffinato e potrebbe avere applicazioni divertenti nella robotica personale, come modellare forme di argilla o arrotolare il riso appiccicoso per il sushi.
Nella progettazione robotica, i simulatori fisici sono modelli che catturano come i diversi materiali rispondono alla forza. I robot vengono "addestrati" utilizzando i modelli, prevedere i risultati delle loro interazioni con gli oggetti, come spingere una scatola solida o colpire argilla deformabile. Ma i simulatori tradizionali basati sull'apprendimento si concentrano principalmente su oggetti rigidi e non sono in grado di gestire fluidi o oggetti più morbidi. Alcuni simulatori basati sulla fisica più accurati possono gestire materiali diversi, ma fanno molto affidamento su tecniche di approssimazione che introducono errori quando i robot interagiscono con oggetti nel mondo reale.
In un documento presentato alla Conferenza internazionale sulle rappresentazioni dell'apprendimento a maggio, i ricercatori descrivono un nuovo modello che impara a catturare come piccole porzioni di materiali diversi - "particelle" - interagiscono quando vengono colpite e pungolate. Il modello apprende direttamente dai dati nei casi in cui la fisica sottostante ai movimenti è incerta o sconosciuta. I robot possono quindi utilizzare il modello come guida per prevedere come i liquidi, così come materiali rigidi e deformabili, reagirà alla forza del suo tocco. Mentre il robot maneggia gli oggetti, il modello aiuta anche a perfezionare ulteriormente il controllo del robot.
Negli esperimenti, una mano robotica con due dita, chiamato "RiceGrip, " ha modellato accuratamente una schiuma deformabile nella configurazione desiderata, ad esempio una forma a "T", che funge da proxy per il riso sushi. In breve, il modello dei ricercatori funge da tipo di cervello "fisico intuitivo" che i robot possono sfruttare per ricostruire oggetti tridimensionali in qualche modo in modo simile a come fanno gli umani.
"Gli esseri umani hanno un modello fisico intuitivo nelle nostre teste, dove possiamo immaginare come si comporterà un oggetto se lo spingiamo o lo stringiamo. Sulla base di questo modello intuitivo, gli esseri umani possono compiere incredibili compiti di manipolazione che sono ben oltre la portata degli attuali robot, " dice il primo autore Yunzhu Li, uno studente laureato nel Laboratorio di Informatica e Intelligenza Artificiale (CSAIL). "Vogliamo costruire questo tipo di modello intuitivo per i robot per consentire loro di fare ciò che gli umani possono fare".
"Quando i bambini hanno 5 mesi, hanno già aspettative diverse per solidi e liquidi, " aggiunge il coautore Jiajun Wu, uno studente laureato CSAIL. "Questo è qualcosa che sappiamo in tenera età, quindi forse è qualcosa che dovremmo provare a modellare per i robot".
Insieme a Li e Wu sul giornale ci sono:Russ Tedrake, un ricercatore CSAIL e un professore del Dipartimento di Ingegneria Elettrica e Informatica (EECS); Giosuè Tenenbaum, un professore del Dipartimento di Scienze del Cervello e Cognitive; e Antonio Torralba, un professore in EECS e direttore del MIT-IBM Watson AI Lab.
Grafici dinamici
Un'innovazione chiave dietro il modello, chiamata "rete di interazione delle particelle" (DPI-Nets), stava creando grafici di interazione dinamica, che consistono di migliaia di nodi e bordi in grado di catturare comportamenti complessi delle cosiddette particelle. Nei grafici, ogni nodo rappresenta una particella. I nodi vicini sono collegati tra loro usando archi diretti, che rappresentano l'interazione che passa da una particella all'altra. Nel simulatore, le particelle sono centinaia di piccole sfere combinate per formare un liquido o un oggetto deformabile.
I grafici sono costruiti come base per un sistema di apprendimento automatico chiamato rete neurale a grafo. In allenamento, il modello nel tempo apprende come le particelle in materiali diversi reagiscono e si rimodellano. Lo fa calcolando implicitamente varie proprietà per ogni particella, come la sua massa ed elasticità, per prevedere se e dove la particella si sposterà nel grafico quando sarà perturbata.
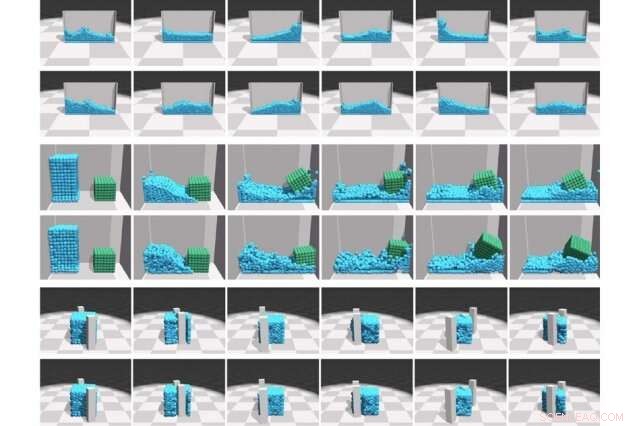
Il modello sfrutta quindi una tecnica di "propagazione", che diffonde istantaneamente un segnale in tutto il grafico. I ricercatori hanno personalizzato la tecnica per ogni tipo di materiale:rigido, deformabile, e liquido, per emettere un segnale che predice le posizioni delle particelle a determinati passi temporali incrementali. Ad ogni passo, muove e riconnette le particelle, se necessario.
Per esempio, se viene premuta una casella piena, le particelle perturbate verranno spostate in avanti. Poiché tutte le particelle all'interno della scatola sono rigidamente collegate tra loro, ogni altra particella nell'oggetto si sposta alla stessa distanza calcolata, rotazione, e qualsiasi altra dimensione. Le connessioni delle particelle rimangono intatte e la scatola si muove come una singola unità. Ma se un'area di schiuma deformabile è rientrata, l'effetto sarà diverso. Le particelle perturbate si muovono molto in avanti, le particelle circostanti si muovono solo leggermente in avanti, e le particelle più lontane non si muoveranno affatto. Con i liquidi che vengono sparsi in una tazza, le particelle possono saltare completamente da un'estremità all'altra del grafico. Il grafico deve imparare a prevedere dove e quanto si muovono tutte le particelle interessate, che è computazionalmente complesso.
Modellare e adattare
Nella loro carta, i ricercatori dimostrano il modello incaricando il robot RiceGrip a due dita di bloccare le forme del bersaglio dalla schiuma deformabile. Il robot utilizza prima una telecamera di rilevamento della profondità e tecniche di riconoscimento degli oggetti per identificare la schiuma. I ricercatori selezionano casualmente le particelle all'interno della forma percepita per inizializzare la posizione delle particelle. Quindi, il modello aggiunge bordi tra le particelle e ricostruisce la schiuma in un grafico dinamico personalizzato per i materiali deformabili.
A causa delle simulazioni apprese, il robot ha già una buona idea di come ogni tocco, data una certa quantità di forza, influenzerà ciascuna delle particelle nel grafico. Quando il robot inizia a incidere la schiuma, abbina iterativamente la posizione reale delle particelle alla posizione mirata delle particelle. Ogni volta che le particelle non si allineano, invia un segnale di errore al modello. Quel segnale modifica il modello in modo che corrisponda meglio alla fisica reale del materiale.
Prossimo, i ricercatori mirano a migliorare il modello per aiutare i robot a prevedere meglio le interazioni con scenari parzialmente osservabili, come sapere come si muoverà una pila di scatole quando viene spinta, anche se sono visibili solo le caselle in superficie e la maggior parte delle altre caselle è nascosta.
I ricercatori stanno anche esplorando modi per combinare il modello con un modulo di percezione end-to-end operando direttamente sulle immagini. Questo sarà un progetto congiunto con il gruppo di Dan Yamins; Yamin ha recentemente completato il suo postdoc al MIT ed è ora assistente professore alla Stanford University. "Hai sempre a che fare con questi casi in cui ci sono solo informazioni parziali, " Wu dice. "Stiamo estendendo il nostro modello per apprendere la dinamica di tutte le particelle, pur vedendo solo una piccola parte."
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.