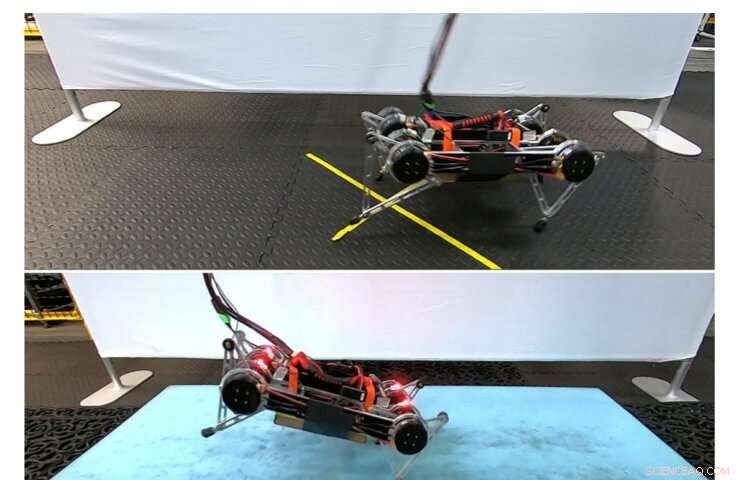
Credito:arXiv:2002.08550 [cs.RO]
Il campo della robotica ha fatto un passo avanti, seguito da un altro, poi molti altri, quando un robot chiamato Rainbow Dash di recente ha imparato a camminare da solo. La macchina a quattro zampe ha richiesto solo poche ore per imparare a camminare avanti e indietro, e gira a destra e a sinistra mentre lo fai.
Ricercatori di Google, L'UC Berkeley e il Georgia Institute of Technology hanno pubblicato un documento sul server di prestampa ArXiv che descrive una tecnica di intelligenza artificiale statistica nota come apprendimento per rinforzo profondo che hanno usato per produrre questo risultato, che è significativo per diversi motivi.
La maggior parte delle implementazioni di apprendimento per rinforzo avviene in ambienti simulati al computer. Arcobaleno, però, ha usato questa tecnologia per imparare a camminare in un ambiente fisico reale.
Inoltre, è stato in grado di farlo senza un meccanismo di insegnamento dedicato, come istruttori umani o dati di formazione etichettati. Finalmente, Rainbow Dash è riuscito a camminare su più superfici, tra cui un materasso in morbida schiuma e uno zerbino con rientranze abbastanza notevoli.
Le tecniche di apprendimento per rinforzo profondo utilizzate dal robot comprendono un tipo di apprendimento automatico in cui un agente interagisce con un ambiente per apprendere per tentativi ed errori. La maggior parte dei casi d'uso dell'apprendimento per rinforzo riguarda giochi computerizzati in cui gli agenti digitali imparano a giocare per vincere.
Questa forma di apprendimento automatico è nettamente diversa dall'apprendimento tradizionale supervisionato o non supervisionato, in cui i modelli di machine learning richiedono dati di training etichettati per l'apprendimento. L'apprendimento per rinforzo profondo combina approcci di apprendimento per rinforzo con l'apprendimento profondo, in cui la scala dell'apprendimento automatico tradizionale è notevolmente ampliata con un'enorme potenza di calcolo.
Sebbene il team di ricerca abbia accreditato Rainbow Dash per aver imparato a camminare da solo, l'intervento umano giocava ancora un ruolo sostanziale nel raggiungimento di tale obiettivo. I ricercatori hanno dovuto creare confini entro i quali il robot ha imparato a camminare per impedirgli di lasciare l'area.
Hanno anche dovuto escogitare algoritmi specifici per evitare che il robot cadesse, alcuni dei quali si concentravano sulla limitazione del movimento del robot. Per prevenire incidenti come danni da caduta, l'apprendimento per rinforzo della robotica di solito avviene in un ambiente digitale prima che gli algoritmi vengano trasferiti a un robot fisico per preservarne la sicurezza.
Il trionfo di Rainbow Dash avviene circa un anno dopo che i ricercatori hanno inizialmente scoperto come far imparare ai robot in fisica, al contrario del virtuale, dintorni.
Chelsea finlandese, un assistente professore di Stanford associato a Google che non ha partecipato alla ricerca, dice, "Rimuovere la persona dal processo [di apprendimento] è davvero difficile. Consentendo ai robot di apprendere in modo più autonomo, i robot sono più vicini alla possibilità di apprendere nel mondo reale in cui viviamo".
© 2020 Scienza X Rete