Credito:Sun et al.
Per navigare in ambienti dinamici, i veicoli autonomi (AV) dovrebbero essere in grado di elaborare tutte le informazioni a loro disposizione e utilizzarle per generare strategie di guida efficaci. Ricercatori dell'Università della California, Berkeley, hanno recentemente proposto uno schema di percezione sociale per pianificare il comportamento delle auto a guida autonoma, che potrebbe aiutare a sviluppare AV più attrezzati per affrontare l'incertezza nell'ambiente circostante.
"La mia ricerca si è concentrata su come progettare comportamenti di guida simili a quelli umani per auto a guida autonoma, " Sole luminoso, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Il nostro obiettivo è costruire AV che non solo comprendano il comportamento umano, ma anche agire in modo simile sotto molteplici aspetti, compresa la percezione, ragionamento e azione».
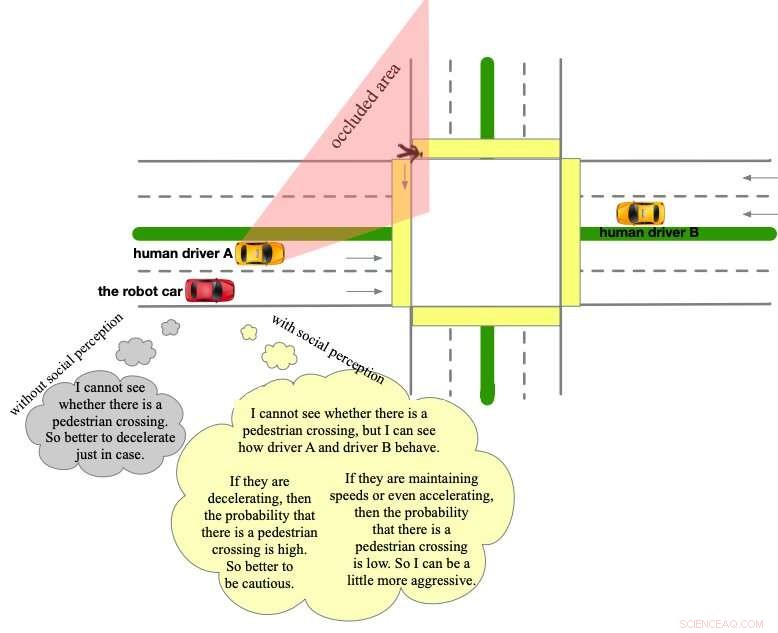
Sun e i suoi colleghi hanno osservato che i conducenti umani tendono a trattare gli altri veicoli come ostacoli dinamici, spesso deducendo ulteriori informazioni dal loro comportamento sulla strada. Queste informazioni sono generalmente informazioni sull'ambiente occluso o informazioni sociali fisicamente non rilevabili.
"Sarebbe molto importante e vantaggioso che gli AV si comportassero allo stesso modo, perché questo li renderebbe più intelligenti, più simile all'uomo e in definitiva più sicuro, " ha detto Sun. "In questo lavoro, lasciamo che gli AV trattino tutti gli altri partecipanti alla strada come sensori dinamici e distribuiti".
Lo schema di percezione sociale proposto da Sun e dai suoi colleghi tratta essenzialmente tutti i veicoli e gli ostacoli sulla strada come sensori distribuiti in una rete di sensori. Ciò consente agli AV di osservare sia i comportamenti individuali che i comportamenti di gruppo, usando le loro osservazioni per aggiornare uniformemente diversi tipi di incertezze all'interno di uno "spazio di credenze". Lo schema si concentra in particolare sulle incertezze dello stato fisico (ad es. causate da occlusioni o portata limitata dei sensori) e sulle incertezze comportamentali sociali (ad es. preferenze di guida locali).
Lo schema integra quindi le credenze di percezione sociale aggiornate con un quadro di pianificazione probabilistico basato sul controllo predittivo del modello (MPC), la cui funzione di costo viene appresa tramite l'apprendimento per rinforzo inverso (IRL). Questa combinazione tra un modulo di pianificazione probabilistica e una percezione socialmente migliorata consente ai veicoli di generare comportamenti difensivi socialmente compatibili e quindi non eccessivamente rigidi.
"Osservando i comportamenti degli altri e confrontandoli con i precedenti modelli di comportamento, Gli AV possono ragionare sui possibili stati delle variabili non rilevabili utilizzando solo i propri sensori, " ha detto Sun. "Questo può aiutare gli AV a ridurre le incertezze di percezione, proprio come fanno gli umani. Rispetto ad altri approcci esistenti, l'idea in questo lavoro estende efficacemente la capacità di percezione degli AV senza alcun hardware aggiuntivo, e può aiutare a generare manovre più sicure ed efficienti".
Sun e i suoi colleghi hanno valutato la loro struttura in una serie di simulazioni con scenari rappresentativi con occlusioni di sensori. Hanno scoperto che imitando i meccanismi di percezione sociale degli umani, il modulo di percezione ha rilevato meno incertezze, generando infine comportamenti AV più sicuri ed efficienti tramite un pianificatore di difesa non conservativo.
"In pratica, questa bella caratteristica può rendere gli AV più efficienti in presenza di occlusioni, oltre che più adattabile ai nuovi ambienti di guida, perché possono rapidamente dedurre e conoscere le informazioni sociali fisicamente non rilevabili nei loro dintorni, "Spiegava il sole.
Nel futuro, lo schema di percezione sociale ideato da questo team di ricercatori potrebbe informare lo sviluppo di auto a guida autonoma in grado di navigare in ambienti in continuo cambiamento in modo più efficace. Sun e i suoi colleghi stanno ora pianificando di sviluppare ulteriormente la loro struttura, modificando alcuni dei suoi presupposti e rendendo più facile l'applicazione in situazioni di vita reale.
"Per dedurre ulteriori informazioni incerte dai comportamenti di altri partecipanti alla strada, Gli AV dovrebbero essere dotati di modelli di comportamento precedenti che possono approssimare i comportamenti effettivi degli altri, " ha spiegato Sun. "Nel lavoro attuale, assumiamo che tutti gli altri partecipanti alla strada siano ottimizzatori razionali e approssimino i loro modelli di generazione del comportamento tramite funzioni di ricompensa. Nel nostro lavoro futuro, stiamo andando ad allentare l'assunzione di razionalità per rendere l'approssimazione più pratica."
© 2019 Science X Network