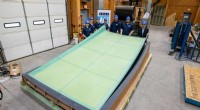
I ricercatori del Soft Machines Lab hanno sviluppato una morbida pelle magnetica con un singolo elemento di rilevamento che rileva la forza e il contatto. Credito:Facoltà di Ingegneria, Università Carnegie Mellon
Dai magazzini agli ospedali, robot morbidi vengono utilizzati in luoghi diversi per assistere gli esseri umani nello spostamento di oggetti, curare i pazienti, e raccogliere informazioni. Poiché gli interessi in questi robot continuano a crescere, gli scienziati stanno sviluppando modi per fornire loro il tipo di capacità di rilevamento che si trovano nei tessuti molli naturali.
Però, questo tentativo porta ampie sfide. La maggior parte dei tipi di pelle tattile richiede un filo per ogni singola posizione in cui le persone desiderano rilevare il tocco. I fili possono eventualmente sembrare un grande nido di uccelli quando si tratta di rilevare grandi aree.
A peggiorare le cose, questa complicata interfaccia elettrica potrebbe danneggiare il sistema. "I cavi potrebbero andare bene all'interno di custodie rigide come smartphone e altri dispositivi, ma se parli di tessuto, pelle, o qualcos'altro che è morbido, poi improvvisamente tutti quei fili diventano fonti di guasto, " disse Carmel Majidi, professore associato di ingegneria meccanica alla Carnegie Mellon University.
Allora come possiamo evitare questa seccatura? Majidi e Tess Hellebrekers del suo Soft Machines Lab hanno sviluppato una soluzione elegante:una morbida pelle magnetica con un singolo elemento sensibile. I loro risultati sono stati pubblicati in Sistemi intelligenti avanzati .
Questa pelle morbida è come un magnete elastico che può essere posizionato sui robot, pelle naturale, o altri materiali per dare loro un senso del tatto. È composto da gomma siliconica caricata con milioni di microparticelle. Ogni particella ha un polo nord e un polo sud, che crea un campo magnetico. Quando il materiale entra in contatto con un altro oggetto, la gomma rileva il movimento e tutte quelle microparticelle inizieranno a muoversi, modificando così il campo magnetico interno all'interno della gomma.
Questi cambiamenti nel campo magnetico verranno poi rilevati dal magnetometro, un chip elettronico incorporato nella pelle magnetica. Misurando questi cambiamenti, il magnetometro può dedurre la posizione e l'intensità del contatto. In altre parole, può stimare dove si trova il tocco e con quanta forza il tocco sta premendo sulla superficie del materiale.
"Penso che la forza e il contatto siano i due interessi chiave per la maggior parte del rilevamento della pelle perché anche la nostra pelle può farlo, " ha detto Hellebrekers, che è un dottorando in robotica.
Cosa c'è di più, questa pelle non ha bisogno di toccare direttamente la superficie del materiale per rilevare i contatti. "La cosa bella dei magneti è che tagliano l'aria, " disse Majidi. "Non devi avere una connessione fisica per percepire quel campo magnetico."
A causa di questo attributo, la pelle magnetica può essere trasformata in un ottimo strumento per la medicina. Scienziati e medici sono diventati più interessati all'uso della robotica morbida in medicina, specialmente nell'endoscopia gastrointestinale (GI). Nonostante abbiano fatto grandi progressi, è ancora difficile incorporare elettronica e sensori perché tendono ad essere molto ingombranti e rigidi, che interferirà con la mobilità degli endoscopi.
Ed è proprio per questo che il team di Majidi è entusiasta di applicare le nuove scoperte. "Un materiale come questo sarebbe potenzialmente un passo avanti in aree come l'endoscopia robotica in cui si desidera introdurre funzioni di rilevamento ma non si desidera utilizzare componenti elettronici ingombranti e una tonnellata di cavi, " disse Majidi.
Per migliorare ulteriormente la pelle magnetica, Il team di Majidi studierà come rilevare la forza lungo oggetti a forma di cilindro, che sono simili agli endoscopi a catetere. Mirano anche ad espandere le aree sensibili della pelle. Attualmente, la pelle magnetica può localizzare il contatto su un continuo 1,5 cm ² la zona. I ricercatori stanno cercando modi per far sì che le microparticelle magnetiche producano un campo magnetico più ampio o per posizionare il magnetometro in posizioni diverse.
Nonostante il loro progetto sia ancora in fase di sviluppo, apre una nuova porta al rilevamento della robotica morbida. "Mi piace molto questo sistema perché possiamo misurare il campo magnetico senza alcuna interfaccia elettrica, " ha affermato Hellebrekers. "Questo ci dà molta più libertà nella progettazione del tipo di interfaccia che sarà integrata molto più facilmente in diversi sistemi".