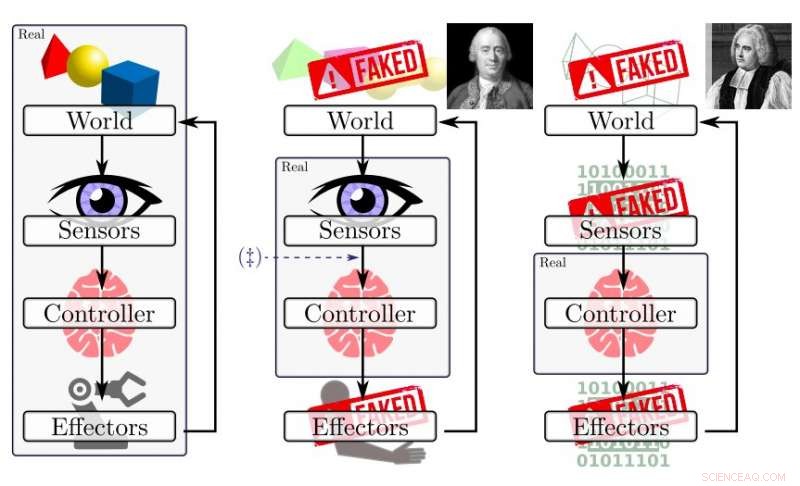
Un'illustrazione di diverse modalità di falsificazione abbinate a posizioni intellettuali appropriate:la visione ortodossa (a sinistra) e due forme di scetticismo filosofico (al centro ea destra). La colonna di sinistra rappresenta un esperimento robotico fisico end-to-end con ogni parte reale. La colonna centrale, recante il busto di David Hume, coinvolge sensori reali ma anche motivo di dubitare della veridicità del mondo che riportano. La colonna più a destra, guidato dal vescovo Berkeley, ha un vero controller ma tutti gli altri elementi sono semplici software:rappresenta un esperimento robotico condotto in simulazione (per l'uso comune di quel termine) in cui le informazioni vengono iniettate direttamente nella corteccia del robot. La rubrica di Hume è il caso studiato nel paper:i robot percepiscono un mondo mediato da sensori che sono radicati nel mondo reale, ma è un mondo di "nient'altro che sofistica e illusione". Credito:Shell &O'Kane.
Per valutare le prestazioni di algoritmi e controllori robotici, i ricercatori in genere utilizzano simulazioni software o robot fisici reali. Sebbene queste possano apparire come due strategie di valutazione distinte, c'è tutta un'altra gamma di possibilità che combinano elementi di entrambi.
In un recente studio, i ricercatori della Texas A&M University e dell'Università della Carolina del Sud hanno deciso di esaminare scenari di valutazione ed esecuzione che si trovano all'intersezione tra simulazioni e implementazioni reali. La loro indagine, delineato in un documento pre-pubblicato su arXiv, si concentra in particolare sui casi in cui i robot reali percepiscono il mondo attraverso i loro sensori, dove l'ambiente che percepiscono potrebbe essere visto come una mera illusione.
"Consideriamo problemi in cui i robot cospirano per presentare una visione del mondo diversa dalla realtà, "Dylan Shell e Jason O'Kane, i ricercatori che hanno condotto lo studio, hanno scritto nel loro giornale. "L'indagine è motivata dal problema di convalidare fisicamente il comportamento dei robot nonostante ci sia una discrepanza tra i robot che abbiamo a disposizione e quelli che desideriamo studiare, o l'ambiente per il test disponibile rispetto a quello desiderato, o altre potenziali discrepanze in questo senso".
Lo studio trae ispirazione da precedenti ricerche biologiche, che mirava a comprendere i limiti percettivi degli organismi viventi e come i disallineamenti informativi possono influenzare il loro comportamento. Negli ultimi anni, i biologi hanno iniziato a utilizzare strumenti tecnologici come la realtà virtuale (VR) e la realtà aumentata (AR) per ottenere una migliore comprensione degli organismi biologici e delle loro percezioni.
Allo stesso modo, le simulazioni software sono diventate una componente chiave della ricerca robotica, con molti ricercatori che li utilizzano per eseguire e testare i loro sistemi e approcci robotici. Nella maggior parte di questi casi, un software di simulazione riproduce alcuni elementi dell'esecuzione di un robot in modo virtuale, piuttosto che fisico, ambiente, generando letture di sensori artificiali o dati relativi allo stato.
Questo pone un'altra domanda:quanto si avvicina un simulatore, che è un sistema in sé, riprodurre davvero il mondo reale? Con questo in testa, i ricercatori si sono proposti di esplorare le relazioni tra coppie di sistemi che "si abbinano tra loro, " così come i casi in cui uno di questi sistemi è abbastanza potente da evocare un'illusione sull'altro.
"Dopo aver formulato il concetto di un'illusione convincente, essenzialmente una nozione di simulazione di sistema che si svolge nel mondo reale, esaminiamo le implicazioni di questo tipo di simulabilità in termini di requisiti infrastrutturali, " Shell e O'Kane hanno spiegato nel loro articolo. "Il tempo è una risorsa importante:alcuni robot possono essere in grado di simularne altri ma, forse, solo a una velocità più lenta del tempo reale".
Shell e O'Kane suggeriscono che le diverse velocità con cui i sistemi possono simulare altri sistemi consentono ai ricercatori di descrivere i sistemi simulati e simulati in una forma relativa. Sulla base di questa ipotesi, hanno sviluppato alcuni teoremi per delineare la relazione tra un sistema simulante e uno simulato, offrendo diversi esempi per ciascuno.
Successivamente, i ricercatori hanno effettuato un semplice esperimento multi-robot basato sulla teoria che hanno sviluppato. In questo esperimento, un robot doveva completare un semplice compito di navigazione in un campo illimitato di ostacoli, sia in simulazione che su un banco di prova robotico fisico. I loro risultati suggeriscono che diversi approcci di simulazione possono avere efficienze temporali notevolmente diverse nel produrre un'illusione per un dato sistema.
Le osservazioni raccolte da Shell e O'Kane, così come la teoria che hanno sviluppato, potrebbe ampliare l'attuale comprensione del software di simulazione utilizzato per valutare gli approcci robotici, evidenziando nuovi aspetti del rapporto tra sistemi simulati e simulanti. Nel loro lavoro futuro, potrebbero esplorare una varietà di nuove direzioni di ricerca, per esempio estendendo la loro teoria per affrontare le nozioni di incertezza e non determinismo o sviluppando una teoria più ricca di illusioni efficienti.
© 2019 Scienza X Rete