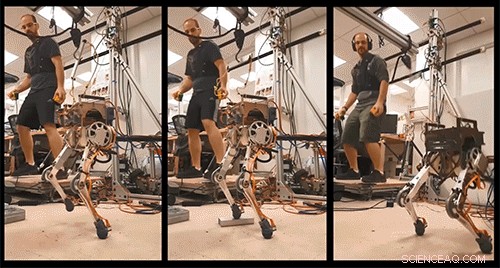
Joao Ramos teleopera il Piccolo HERMES, un robot bipede che può imitare l'equilibrio di un operatore per rimanere in piedi durante la corsa, a piedi, e saltando sul posto. Credito:Joao Ramos e Sangbae Kim
Salvare le vittime da un edificio in fiamme, una fuoriuscita di sostanze chimiche, o qualsiasi disastro inaccessibile ai soccorritori umani potrebbe un giorno essere una missione per persone resilienti, robot adattabili. Immaginare, ad esempio, robot di salvataggio che possono attraversare le macerie a quattro zampe, quindi alzati su due gambe per spingere da parte un ostacolo pesante o sfondare una porta chiusa a chiave.
Gli ingegneri stanno facendo passi da gigante nella progettazione di robot a quattro zampe e sulla loro capacità di correre, saltare e anche fare salti mortali. Ma diventando a due gambe, robot umanoidi per esercitare forza o spingere contro qualcosa senza cadere è stato un ostacolo significativo.
Ora gli ingegneri del MIT e dell'Università dell'Illinois a Urbana-Champaign hanno sviluppato un metodo per controllare l'equilibrio in un robot teleoperato:un passo essenziale per consentire a un umanoide di svolgere compiti ad alto impatto in ambienti difficili.
Il robot della squadra, somigliando fisicamente a un torso lavorato e due gambe, è controllato a distanza da un operatore umano che indossa un giubbotto che trasmette informazioni sul movimento umano e sulle forze di reazione al suolo al robot.
Attraverso il giubbotto, l'operatore umano può sia dirigere la locomozione del robot sia sentire i movimenti del robot. Se il robot inizia a ribaltarsi, l'essere umano sente una corrispondente trazione sul giubbotto e può adattarsi in modo da riequilibrare sia se stessa che, in modo sincrono, Il robot.
Negli esperimenti con il robot per testare questo nuovo approccio di "retroazione dell'equilibrio", i ricercatori sono stati in grado di mantenere a distanza l'equilibrio del robot mentre saltava e camminava sul posto in sincronia con il suo operatore umano.
"È come correre con uno zaino pesante:puoi sentire come le dinamiche dello zaino si muovono intorno a te, e puoi compensare adeguatamente, "dice João Ramos, che ha sviluppato l'approccio come postdoc del MIT. "Ora se vuoi aprire una porta pesante, l'umano può comandare al robot di lanciare il suo corpo contro la porta e di aprirla, senza perdere l'equilibrio».
Ramos, che ora è assistente professore presso l'Università dell'Illinois a Urbana-Champaign, ha dettagliato l'approccio in uno studio che appare in Robotica scientifica . Il suo coautore dello studio è Sangbae Kim, professore associato di ingegneria meccanica al MIT.
Più che movimento
In precedenza, Kim e Ramos hanno costruito il robot a due gambe HERMES (for Highly Efficient Robotic Mechanisms and Electromechanical System) e hanno sviluppato metodi per imitare i movimenti di un operatore tramite teleoperazione, un approccio che, secondo i ricercatori, comporta alcuni vantaggi umanistici.
"Perché hai una persona che può imparare e adattarsi al volo, un robot può eseguire movimenti che non ha mai praticato prima [tramite teleoperazione], "dice Ramos.
Nelle manifestazioni, HERMES ha versato il caffè in una tazza, brandiva un'ascia per tagliare la legna, e maneggiava un estintore per spegnere un incendio.
Tutti questi compiti hanno coinvolto la parte superiore del corpo del robot e algoritmi per abbinare il posizionamento degli arti del robot a quello del suo operatore. HERMES è stato in grado di eseguire movimenti ad alto impatto perché il robot è stato radicato sul posto. Bilancia, in questi casi, era molto più semplice da mantenere. Se il robot dovesse compiere dei passi, però, probabilmente si sarebbe ribaltato nel tentativo di imitare i movimenti dell'operatore.
"Ci siamo resi conto per generare forze elevate o spostare oggetti pesanti, solo copiare i movimenti non sarebbe abbastanza, perché il robot cadrebbe facilmente, " Dice Kim. "Avevamo bisogno di copiare l'equilibrio dinamico dell'operatore".
Entra il piccolo HERMES, una versione in miniatura di HERMES che è circa un terzo delle dimensioni di un adulto umano medio. Il team ha progettato il robot semplicemente come un busto e due gambe, e progettato il sistema specificamente per testare le attività della parte inferiore del corpo, come la locomozione e l'equilibrio. Come con la sua controparte a corpo intero, Little HERMES è progettato per la teleoperazione, con un operatore vestito con un giubbotto per controllare le azioni del robot.
Affinché il robot copi l'equilibrio dell'operatore anziché solo i suoi movimenti, la squadra doveva prima trovare un modo semplice per rappresentare l'equilibrio. Ramos alla fine si rese conto che l'equilibrio poteva essere ridotto a due ingredienti principali:il centro di massa di una persona e il suo centro di pressione, fondamentalmente, un punto sul terreno in cui viene esercitata una forza equivalente a tutte le forze di supporto.
La posizione del centro di massa rispetto al centro di pressione, Ramos trovato, si riferisce direttamente a quanto una persona è equilibrata in un dato momento. Scoprì anche che la posizione di questi due ingredienti poteva essere rappresentata fisicamente come un pendolo invertito. Immagina di oscillare da un lato all'altro rimanendo radicato nello stesso punto. L'effetto è simile all'oscillazione di un pendolo capovolto, l'estremità superiore che rappresenta il centro di massa di un essere umano (di solito nel busto) e la parte inferiore che rappresenta il loro centro di pressione sul terreno.
Sollevamento pesante
Per definire come il centro di massa si riferisce al centro di pressione, Ramos ha raccolto dati sul movimento umano, comprese le misurazioni in laboratorio, dove ondeggiava avanti e indietro, camminato sul posto, e saltò su una piastra di forza che misurava le forze che esercitava a terra, come sono state registrate la posizione dei suoi piedi e del busto. Ha poi condensato questi dati in misurazioni del centro di massa e del centro di pressione, e sviluppato un modello per rappresentare ciascuno in relazione all'altro, come pendolo rovesciato.
Ha poi sviluppato un secondo modello, simile al modello per l'equilibrio umano ma ridimensionato alle dimensioni del più piccolo, robot più leggero, e ha sviluppato un algoritmo di controllo per collegare e abilitare il feedback tra i due modelli.
I ricercatori hanno testato questo modello di feedback sull'equilibrio, prima su un semplice pendolo rovesciato che hanno costruito in laboratorio, a forma di trave all'incirca della stessa altezza del Piccolo HERMES. Hanno collegato il raggio al loro sistema di teleoperazione, e ondeggiava avanti e indietro lungo un binario in risposta ai movimenti di un operatore. Mentre l'operatore ondeggiava da un lato, il raggio faceva lo stesso, un movimento che l'operatore poteva sentire anche attraverso il giubbotto. Se il raggio ondeggiava troppo lontano, l'operatore, sentire l'attrazione, potrebbe appoggiarsi dall'altra parte per compensare, e mantenere il raggio equilibrato.
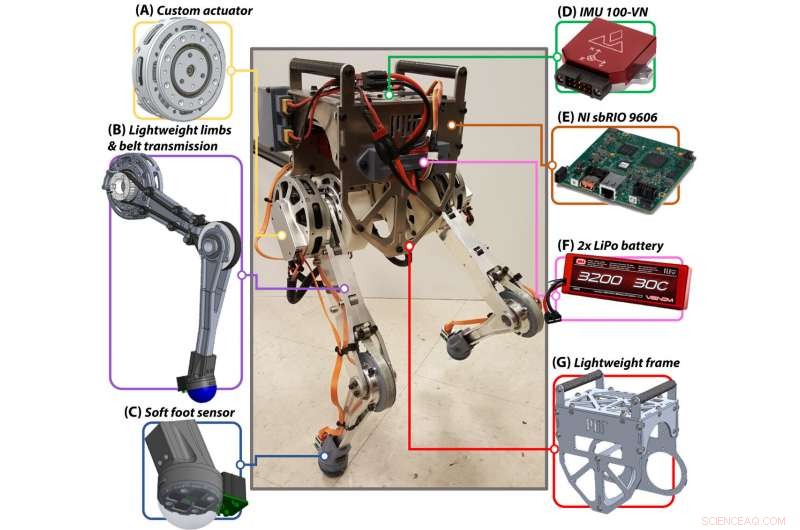
Il robot bipede Piccolo HERMES. Credito:Ramos e Kim, Sci. Robot. 4, eaav4282 (2019)
Gli esperimenti hanno mostrato che il nuovo modello di feedback potrebbe funzionare per mantenere l'equilibrio sulla trave, così i ricercatori hanno poi provato il modello su Little HERMES. Hanno anche sviluppato un algoritmo per il robot per tradurre automaticamente il semplice modello di equilibrio nelle forze che ciascuno dei suoi piedi dovrebbe generare, per copiare i piedi dell'operatore.
Nel laboratorio, Ramos scoprì che mentre indossava il giubbotto, non solo poteva controllare i movimenti e l'equilibrio del robot, ma poteva anche sentire i movimenti del robot. Quando il robot è stato colpito con un martello da varie direzioni, Ramos sentì il giubbotto sobbalzare nella direzione in cui si muoveva il robot. Ramos resistette istintivamente allo strattone, che il robot ha registrato come un sottile spostamento del centro di massa rispetto al centro di pressione, che a sua volta imitava. Il risultato è stato che il robot è stato in grado di evitare di ribaltarsi, anche tra ripetuti colpi al suo corpo.
Il piccolo HERMES imitava Ramos anche in altri esercizi, compreso correre e saltare sul posto, e camminando su un terreno accidentato, il tutto mantenendo il suo equilibrio senza l'ausilio di lacci o supporti.
"Il feedback sull'equilibrio è una cosa difficile da definire perché è qualcosa che facciamo senza pensare, " Dice Kim. "Questa è la prima volta che il feedback del bilanciamento viene definito correttamente per le azioni dinamiche. Questo cambierà il modo in cui controlliamo un umanoide teleoperato."
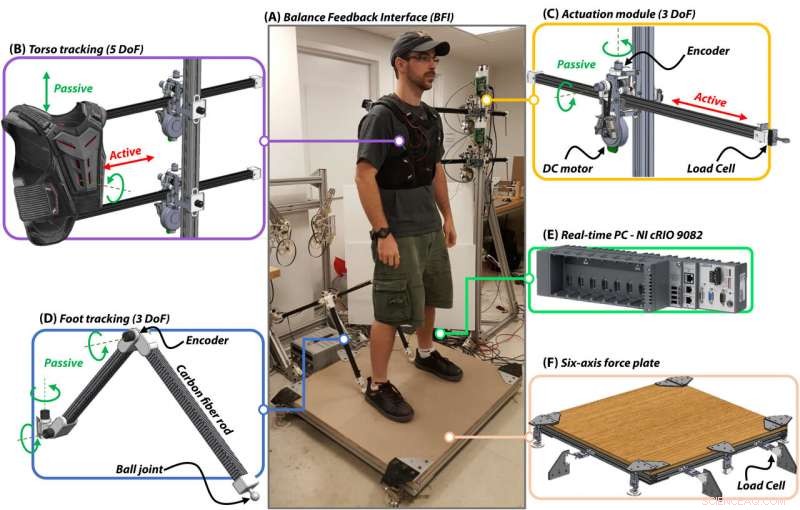
L'interfaccia di teleoperazione per l'operatore umano. Credito:Ramos e Kim, Sci. Robot. 4, eaav4282 (2019)
Kim e Ramos continueranno a lavorare allo sviluppo di un umanoide a corpo intero con un controllo dell'equilibrio simile, un giorno essere in grado di galoppare attraverso una zona disastrata e alzarsi per spingere via le barriere come parte di missioni di salvataggio o salvataggio.
"Ora possiamo aprire porte pesanti o sollevare o lanciare oggetti pesanti, con una corretta comunicazione di equilibrio, " dice Kim.