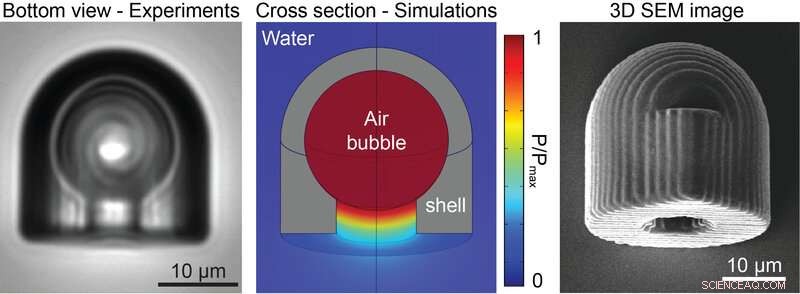
Figura 1. Immagine al microscopio del microrobot alimentato acusticamente con una bolla d'aria sferica intrappolata all'interno del suo corpo (a sinistra); Campo di pressione acustica attorno al microrobot previsto dalle simulazioni numeriche (al centro); Immagine al microscopio elettronico a scansione del microrobot stampato tridimensionalmente con un'aletta affilata in alto (a destra). Credito:Max Planck Institute for Intelligent Systems Stoccarda
I ricercatori dell'Istituto Max Planck per i sistemi intelligenti di Stoccarda hanno progettato e fabbricato un microrobot non legato che può scivolare lungo una superficie piana o curva in un liquido se esposto alle onde ultrasoniche. La sua forza propulsiva è da due a tre ordini di grandezza più forte della forza propulsiva di microrganismi naturali come batteri o alghe. Inoltre, può trasportare merci durante il nuoto. Il robot a propulsione acustica ha quindi un potenziale significativo per rivoluzionare il futuro trattamento minimamente invasivo dei pazienti.
Stoccarda—I ricercatori dell'Istituto Max Planck per i sistemi intelligenti (MPI-IS) di Stoccarda hanno sviluppato un robot in miniatura sintetico con un diametro di 25 micrometri, che viene spinto acusticamente in avanti, un proiettile in corsa, nel vero senso della parola. Meno del diametro di un capello umano, mai prima d'ora un microrobot così azionato ha raggiunto questa velocità. Il suo design intelligente è così efficiente che supera persino le capacità di nuoto dei microrganismi naturali.
Gli scienziati hanno progettato il microrobot polimerico stampato in 3D con una cavità sferica e un piccolo ugello a forma di tubo verso il basso (vedi figura 1). Circondato da liquidi come l'acqua, la cavità intrappola una bolla d'aria sferica. Una volta che il robot è esposto a onde acustiche di circa 330 kHz, la bolla d'aria pulsa, spingendo il liquido all'interno del tubo verso l'estremità posteriore del microrobot. Il movimento del liquido quindi spinge il proiettile in avanti abbastanza vigorosamente fino a 90 lunghezze del corpo al secondo. Questa è una forza di spinta da due a tre ordini di grandezza più forte di quella di microrganismi naturali come alghe o batteri. Entrambi sono tra i micronuotatori più efficienti in natura, ottimizzato dall'evoluzione.
La distribuzione di onde ultrasoniche per azionare i microrobot non è un approccio nuovo. Però, i precedenti robot con capacità di nuoto hanno dimostrato di essere relativamente lenti, difficile da controllare vicino alle superfici, e hanno avuto un tempo di funzionamento relativamente breve di pochi minuti. Tutti questi fattori sono ostacoli al loro utilizzo nelle applicazioni mediche per la somministrazione mirata di farmaci, disintossicazione, o interventi chirurgici non invasivi. Gli scienziati del Dipartimento di Intelligenza Fisica dell'MPI-IS, Dott.ssa Amirreza Aghakhani, Oncay Yasa, Paul Wrede, e il dottor Metin Sitti, chi è il direttore del dipartimento, sono stati in grado di mettere a punto le capacità di guida del loro robot aumentando il tempo di funzionamento a diverse ore. La loro pubblicazione "Microrobot mobili a scorrimento superficiale ad alimentazione acustica" è stata pubblicata su Atti dell'Accademia Nazionale delle Scienze nel febbraio 2020.
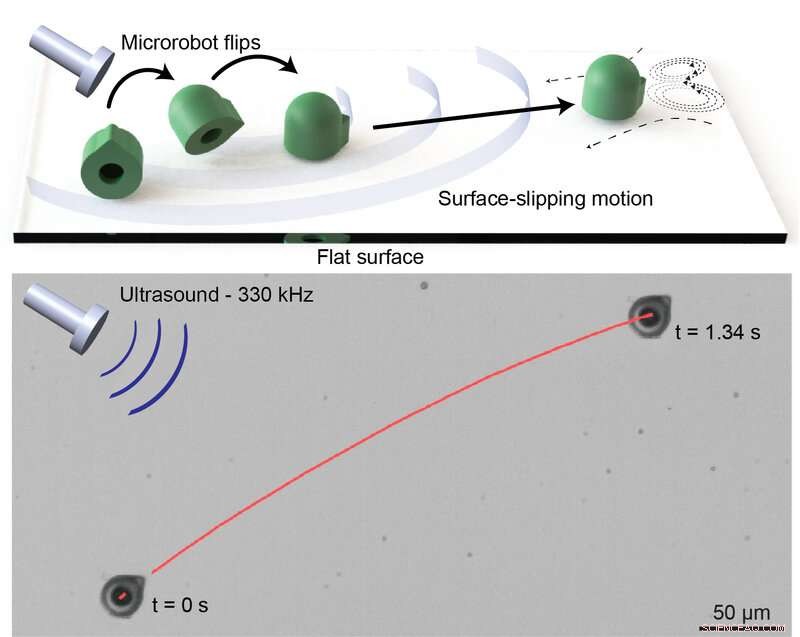
Figura 2. Schema di un microrobot a scorrimento superficiale alimentato a ultrasuoni (in alto); Immagine time-lapse del microbot in movimento su un substrato a eccitazione acustica di 330 kHz (in basso). Credito:Max Planck Institute for Intelligent Systems Stoccarda
Oltre a progettare il robot con una cavità interna che intrappola una bolla d'aria sferica con una piccola apertura, hanno aggiunto una piccola pinna alla superficie cilindrica del corpo del microrobot (vedi figura 2), che distorce la direzione di propulsione. Hanno anche rivestito la parte superiore del proiettile polimerico con uno strato di nanofilm magnetico morbido. Con l'aiuto dei campi magnetici esterni circostanti, erano quindi in grado di alterare la direzione del proiettile a sinistra o a destra, così come su o giù.
In diversi esperimenti, i ricercatori hanno testato la capacità del loro robot di muoversi su diverse superfici all'interno di un microcanale simile a un vaso sanguigno. Hanno esposto il robot a onde acustiche e un campo magnetico e sono riusciti a farlo navigare in questo spazio 3D confinato. Hanno anche dimostrato che l'intrappolamento del carico avviene automaticamente mentre il microrobot si muove. Mentre il liquido viene spinto fuori dalla cavità del robot quando esposto alle onde ultrasoniche, viene generato un pattern di microstreaming circolare verso il basso (vedi figura 2). Questa corrente assicura che le particelle di droga circostanti siano guidate verso il robot. Là, le particelle si accumulano e vengono trasportate via con il movimento del robot. Grazie a questo, il robot potrebbe un giorno essere applicato per raccogliere particelle di farmaco antitumorale all'interno del flusso sanguigno e in particolare trasportare il farmaco verso un carcinoma, rilasciando il carico a distanza ravvicinata per il massimo impatto.
Dott.ssa Amirreza Aghakhani, ricercatore post-dottorato presso il Dipartimento di Intelligenza Fisica e co-autore principale della pubblicazione, riassume le caratteristiche speciali del microrobot:"Possiamo azionare i nostri microrobot in modo molto efficiente, e sono anche molto veloci. Gli ultrasuoni sono innocui per il corpo e possono penetrare nelle regioni più profonde del corpo. Possiamo spostare questi robot su superfici sia piane che curve in modo controllato e possiamo attaccare carichi diversi, come i farmaci. Questo è impressionante".
Un altro vantaggio è l'ecografia. Dentro il corpo, l'imaging è molto impegnativo quando il robot ha una dimensione di pochi micrometri. "Però, la bolla d'aria intrappolata può agire come mezzo di contrasto, rendere più visibile il robot e la sua posizione, " aggiunge il dottor Aghakhani.
"La nostra visione è quella di distribuire questi microrobot alimentati acusticamente e guidati magneticamente all'interno del corpo umano per varie applicazioni mediche non invasive nel prossimo futuro, " Conclude il dottor Metin Sitti.