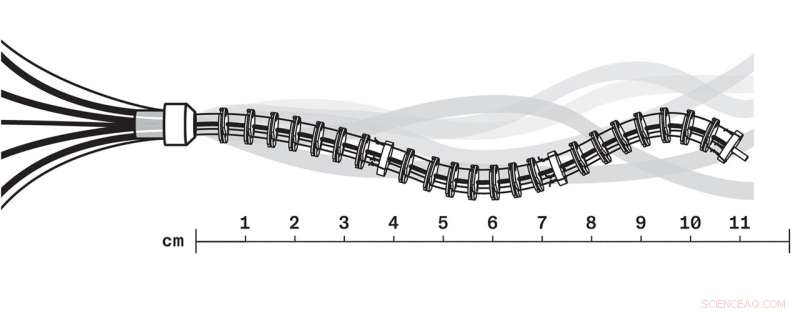
I robot continui "azionati da tendini" qui raffigurati hanno, nella vita reale, un diametro di circa sette millimetri e sono costruiti in sezioni che possono variare in lunghezza da 15 a 70 millimetri. Altri modelli possono essere ancora più stretti. Tutti mostrano un movimento simile a un tentacolo. Credito:Università di Toronto
Jessica Burgner-Kahrs, direttrice del Continuum Robotics Lab presso l'Università di Toronto Mississauga, e il suo team stanno costruendo robot molto snelli, flessibili ed estensibili, di pochi millimetri di diametro, per l'uso in chirurgia e industria. Potresti chiamarla "zoobotica".
A differenza dei robot umanoidi, i cosiddetti robot continui sono caratterizzati da corpi lunghi e privi di arti, non diversamente da quelli di un serpente, che consentono loro di accedere a luoghi difficili da raggiungere.
Considera un neurochirurgo che ha bisogno di rimuovere un tumore al cervello. Utilizzando uno strumento chirurgico tradizionale e rigido, il chirurgo deve raggiungere la massa cancerosa seguendo un percorso rettilineo nel cervello e rischiare di penetrare e danneggiare il tessuto vitale.
Professore associato di scienze matematiche e computazionali presso la U of T Mississauga, Burgner-Kahrs immagina un giorno in cui uno dei suoi robot simili a serpenti, guidato da un chirurgo, sarebbe in grado di percorrere un percorso tortuoso attorno al tessuto vitale ma raggiungere comunque il sito chirurgico preciso. Tumori cerebrali precedentemente inoperabili potrebbero diventare improvvisamente operabili.
"Potrebbe rivoluzionare la chirurgia", afferma.
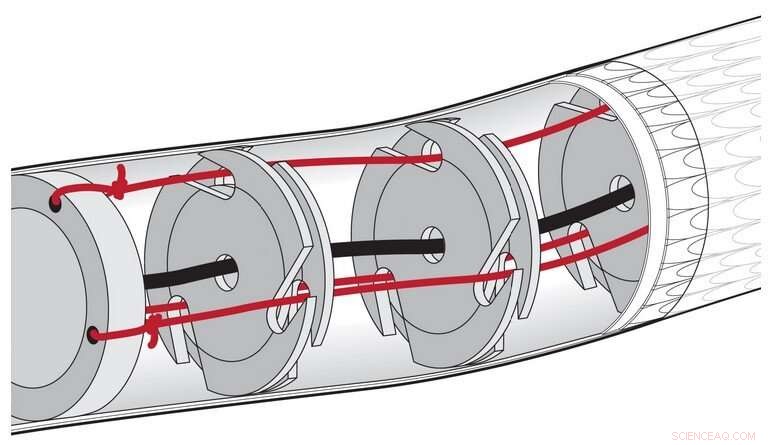
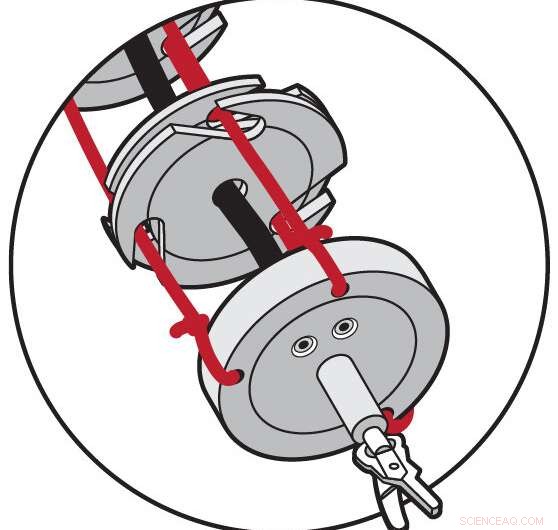
I fili che attraversano il "corpo" del robot si attaccano a un disco più spesso all'estremità di ciascun segmento del corpo. Questi fili vengono tirati per controllare i singoli segmenti del robot e piegarli in diverse direzioni. I magneti all'interno di ciascun disco, disposti con polarità alternate, assicurano che i dischi rimangano equidistanti indipendentemente dalla lunghezza del segmento del robot. Questo aiuta il robot a piegarsi come desiderato e ad attraversare un percorso curvilineo in un movimento "segui il leader":il "corpo" simile a un serpente segue il percorso della "testa". Il laboratorio ha sviluppato una guaina di scaglie sovrapposte inserita tra due strati di silicone. Quando viene applicato un vuoto tra gli strati di silicone, il robot normalmente flessibile diventa rigido. Credito:Colin Hayes
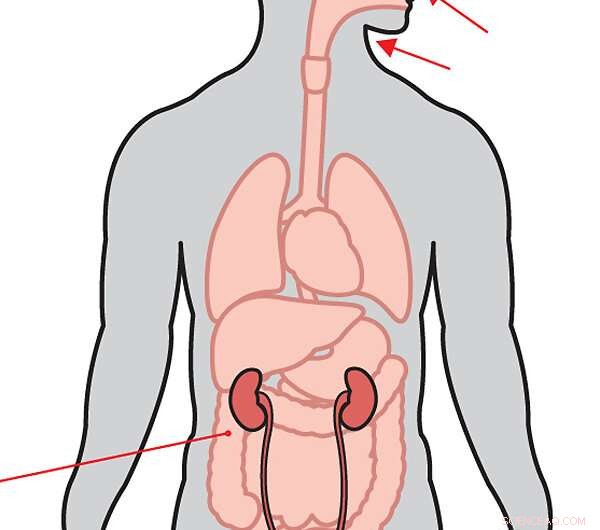
Burgner-Kahrs, scienziata informatica e ingegnere meccanico, afferma che il suo laboratorio sta anche sviluppando una generazione più avanzata di robot continui dotati di sensori e in grado di sterzare parzialmente da soli. Un chirurgo dovrebbe azionare il robot a distanza con un computer, ma il robot saprebbe come evitare gli ostacoli e riconoscere la sua destinazione. Un chirurgo potrebbe utilizzare uno di questi robot per raccogliere un campione di tessuto dall'addome, ad esempio, o iniettare un farmaco antitumorale direttamente in un tumore nei polmoni.
Ci sono usi anche al di fuori del corpo umano.
Burgner-Kahrs sta sviluppando diversi tipi di robot continui che potrebbero essere utilizzati negli interventi chirurgici da buco della serratura, causando traumi ancora minori ai pazienti rispetto alle attuali tecniche chirurgiche minimamente invasive. Credito:Colin Hayes
Un robot continuo potrebbe scivolare attraverso l'interno di un motore a reazione, ispezionandolo per danni. Il laboratorio sta sperimentando nuove forme ancora più abili ed estensibili. Un design recente, con potenziali applicazioni di ricerca e salvataggio, è ispirato agli origami:è molto leggero e può allungarsi fino a 10 volte di più rispetto ad altri design.
I robot potrebbero essere dotati di telecamere, consentendo all'operatore di vedere dove si trova il robot. Piccoli strumenti chirurgici possono essere montati secondo necessità, tra cui pinze, un laser o un dispositivo di aspirazione. Credito:Colin Hayes
Robot continui di nuova generazione
Per sviluppare robot che possono essere utilizzati in sicurezza in una varietà di applicazioni mediche e di altro tipo, Burgner-Kahrs mira a rispondere alle seguenti domande: