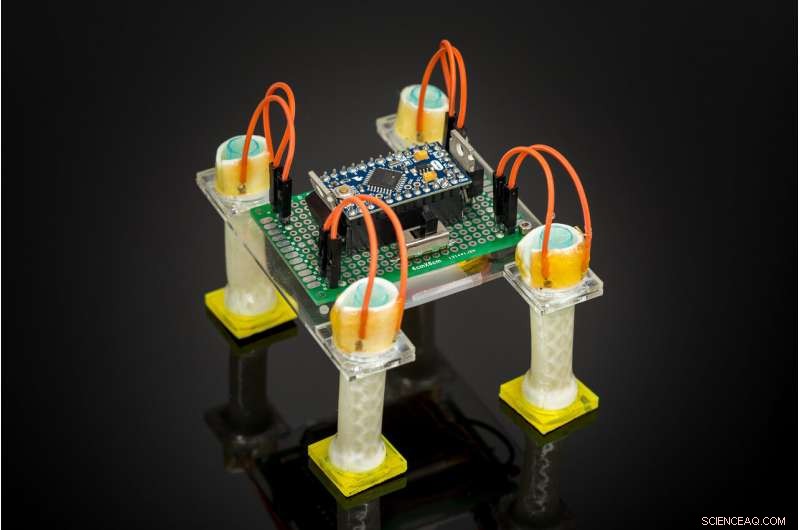
controllato elettricamente, robot morbido untethered composto da quattro attuatori tubolari morbidi, un microcontrollore e una batteria. Il robot può essere programmato per camminare o trasportare un oggetto. Credito:David Baillot/UC San Diego Jacobs School of Engineering
Gli ingegneri dell'Università della California a San Diego hanno sviluppato un modo per costruire robot morbidi compatti, portatile e multifunzionale. L'anticipo è stato reso possibile dalla creazione di soft, attuatori tubolari i cui movimenti sono comandati elettricamente, rendendoli facili da integrare con piccoli componenti elettronici.
A riprova del concetto, gli ingegneri hanno usato questi nuovi attuatori per costruire un morbido, robot alimentato a batteria in grado di camminare liberamente su superfici piane e spostare oggetti. Hanno anche costruito una pinza morbida in grado di afferrare e raccogliere piccoli oggetti.
Il gruppo, guidato dal professore di ingegneria meccanica e aerospaziale della UC San Diego Shengqiang Cai, pubblicato il lavoro l'11 ottobre in Progressi scientifici .
Un problema con la maggior parte degli attuatori morbidi è che vengono forniti con configurazioni ingombranti. Questo perché i loro movimenti sono controllati pompando aria o fluidi attraverso le camere all'interno. Quindi costruire robot con questi tipi di attuatori richiederebbe il loro collegamento alle pompe, grandi fonti di energia e altre apparecchiature specializzate.
Nello studio attuale, Gli ingegneri della UC San Diego hanno creato attuatori morbidi controllati con l'elettricità. "Questa caratteristica rende i nostri attuatori tubolari compatibili con la maggior parte delle dispositivi elettronici e batterie disponibili in commercio, " disse Cai.
Gli attuatori sono realizzati con un tipo di materiale utilizzato per i muscoli artificiali nei robot, chiamati elastomeri a cristalli liquidi. Sono composti da molecole di cristalli liquidi incorporate in una rete polimerica elastica. La particolarità di questi materiali è che cambiano forma, si muovono e si contraggono in risposta a stimoli come il calore o l'elettricità, in modo simile a come i muscoli si contraggono in risposta ai segnali delle cellule nervose.
Per costruire ogni attuatore, gli ingegneri hanno inserito tre fili di riscaldamento tra due sottili pellicole di elastomero a cristalli liquidi. Il materiale viene quindi arrotolato in un tubo, prestirato ed esposto ai raggi UV.
Ogni filo riscaldante può essere controllato indipendentemente per far piegare il tubo in sei diverse direzioni. Quando una corrente elettrica viene fatta passare attraverso uno o due dei fili, riscalda parte del tubo e lo fa piegare nella direzione di quei fili. Quando una corrente viene inviata attraverso tutti e tre i fili, l'intero tubo si contrae, accorciamento in lunghezza. Quando l'elettricità è spenta, il tubo si raffredda lentamente e ritorna alla sua forma originale.

controllato elettricamente, robot morbido untethered composto da quattro attuatori tubolari morbidi, un microcontrollore e una batteria. Il robot può essere programmato per camminare o trasportare un oggetto. Credito:David Baillot/UC San Diego Jacobs School of Engineering
"L'utilizzo di un potenziale elettrico applicato esternamente semplifica la programmazione della posizione di ciascun attuatore tubolare, " ha detto il primo autore Qiguang He, un dottorato di ricerca in ingegneria meccanica e aerospaziale. studente presso la UC San Diego Jacobs School of Engineering.
La combinazione di più attuatori ha consentito agli ingegneri di costruire diversi tipi di robot morbidi. Hanno costruito un untethered, robot ambulante che utilizza quattro attuatori come gambe. Questo robot è alimentato da una piccola batteria al litio/polimero a bordo. Hanno anche costruito una pinza morbida utilizzando tre attuatori come dita.
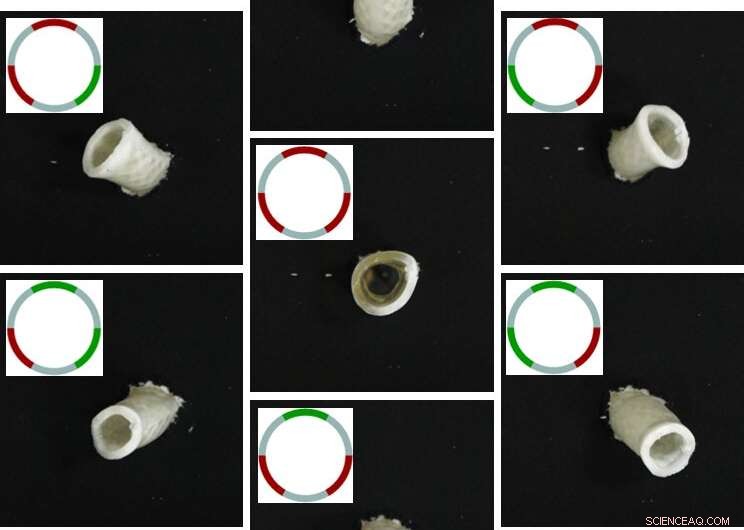
A seconda di quali fili di riscaldamento sono attivati elettricamente (rosso), l'attuatore tubolare morbido può piegarsi in sei diverse direzioni (immagini esterne) e contrarsi in lunghezza (immagine centrale). Credito:Qiguang He
Ogni robot ha un microcontrollore a bordo in cui gli ingegneri hanno programmato una sequenza di movimenti controllati elettricamente per gli attuatori. Ciò consente ai robot di muoversi indipendentemente.
Il team sta ora lavorando per realizzare attuatori morbidi in grado di muoversi più velocemente. Gli attuali attuatori impiegano circa 30 secondi per piegarsi e contrarsi completamente, e fino a quattro minuti per tornare alle loro forme originali. Questo perché il materiale impiega un po' di tempo per riscaldarsi e raffreddarsi completamente. L'obiettivo finale è realizzare attuatori in grado di contrarsi e rilassarsi con la stessa rapidità dei muscoli umani, Egli ha detto.