Credito:Università di Washington
All'inizio della pandemia di COVID-19, le aziende produttrici di automobili come Ford hanno spostato rapidamente la loro attenzione sulla produzione dalle automobili alle maschere e ai ventilatori.
Per rendere possibile questo passaggio, queste aziende si affidavano a persone che lavoravano su una catena di montaggio. Sarebbe stato troppo difficile per un robot effettuare questa transizione perché i robot sono legati alle loro solite attività.
In teoria, un robot potrebbe raccogliere quasi tutto se le sue pinze potessero essere sostituite per ogni attività. Per contenere i costi, queste pinze potrebbero essere passive, il che significa che le pinze raccolgono oggetti senza cambiare forma, in modo simile a come funzionano le pinze su un carrello elevatore.
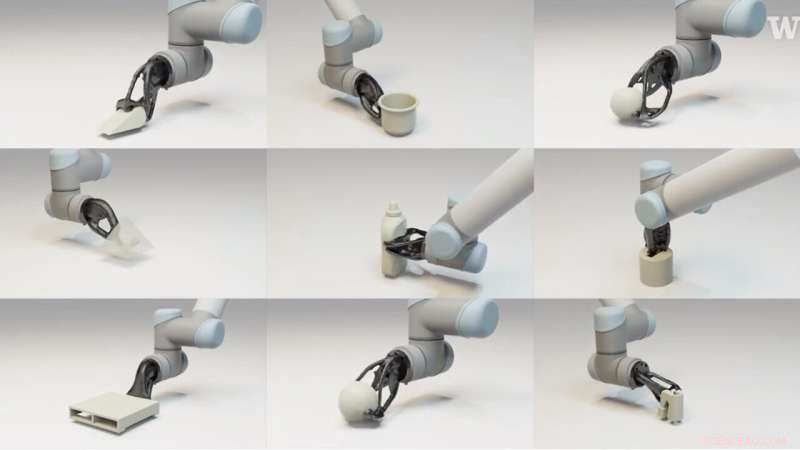
Un team dell'Università di Washington ha creato un nuovo strumento in grado di progettare una pinza passiva stampabile in 3D e calcolare il percorso migliore per raccogliere un oggetto. Il team ha testato questo sistema su una suite di 22 oggetti, tra cui un coniglietto stampato in 3D, un cuneo a forma di fermaporta, una pallina da tennis e un trapano. Le pinze e i percorsi progettati hanno avuto successo per 20 oggetti. Due di questi erano il cuneo e una forma piramidale con un buco della serratura ricurvo. Entrambe le forme sono difficili da raccogliere per più tipi di pinze.
Il team presenterà questi risultati l'11 agosto al SIGGRAPH 2022.
"Produciamo ancora la maggior parte dei nostri articoli con catene di montaggio, che sono davvero fantastiche ma anche molto rigide. La pandemia ci ha mostrato che dobbiamo avere un modo per riutilizzare facilmente queste linee di produzione", ha affermato l'autrice senior Adriana Schulz, assistente professore di UW presso la Paul G. Allen School of Computer Science &Engineering. "La nostra idea è quella di creare utensili personalizzati per queste linee di produzione. Questo ci offre un robot molto semplice che può svolgere un'attività con una pinza specifica. E poi, quando cambio attività, sostituisco semplicemente la pinza".
Le pinze passive non possono essere regolate per adattarsi all'oggetto che stanno raccogliendo, quindi tradizionalmente gli oggetti sono stati progettati per adattarsi a una pinza specifica.
"La pinza passiva di maggior successo al mondo sono le pinze su un carrello elevatore. Ma il compromesso è che le pinze per carrelli elevatori funzionano bene solo con forme specifiche, come i pallet, il che significa che tutto ciò che si desidera afferrare deve essere su un pallet", ha affermato co-autore Jeffrey Lipton, assistente professore di ingegneria meccanica alla UW. "Qui stiamo dicendo 'Ok, non vogliamo predefinire la geometria della pinza passiva.' Invece, vogliamo prendere la geometria di qualsiasi oggetto e progettare una pinza."
Per ogni dato oggetto, ci sono molte possibilità per come potrebbe apparire la sua pinza. Inoltre, la forma della pinza è collegata al percorso che il braccio del robot compie per raccogliere l'oggetto. Se progettata in modo errato, una pinza potrebbe schiantarsi contro l'oggetto durante il percorso per raccoglierlo. Per affrontare questa sfida, i ricercatori hanno avuto alcune informazioni chiave.
"I punti in cui la pinza entra in contatto con l'oggetto sono essenziali per mantenere la stabilità dell'oggetto nella presa. Chiamiamo questo insieme di punti 'configurazione di presa'", ha affermato l'autore principale Milin Kodnongbua, che ha completato questa ricerca come studente universitario dell'UW nella Scuola Allen. "Inoltre, la pinza deve entrare in contatto con l'oggetto in quei punti indicati e la pinza deve essere un unico oggetto solido che collega i punti di contatto al braccio del robot. Possiamo cercare una traiettoria dell'inserto che soddisfi questi requisiti."
Durante la progettazione di una nuova pinza e di una nuova traiettoria, il team inizia fornendo al computer un modello 3D dell'oggetto e il suo orientamento nello spazio, ad esempio come verrebbe presentato su un nastro trasportatore.
"In primo luogo, il nostro algoritmo genera possibili configurazioni di acquisizione e le classifica in base alla stabilità e ad alcune altre metriche", ha affermato Kodnongbua. "Quindi prende l'opzione migliore e co-ottimizza per trovare se una traiettoria di inserimento è possibile. Se non riesce a trovarne una, passa alla configurazione di presa successiva nell'elenco e prova a eseguire nuovamente la co-ottimizzazione."
Una volta che il computer ha trovato una buona corrispondenza, emette due serie di istruzioni:una per una stampante 3D per creare la pinza e una con la traiettoria per il braccio del robot una volta che la pinza è stata stampata e fissata.
Il team ha scelto una varietà di oggetti per testare la potenza del metodo, inclusi alcuni da un set di dati di oggetti che sono lo standard per testare la capacità di un robot di svolgere attività di manipolazione.
"Abbiamo anche progettato oggetti che sarebbero stati difficili per i tradizionali robot di presa, come oggetti con angoli molto bassi o oggetti con presa interna, in cui è necessario raccoglierli con l'inserimento di una chiave", ha affermato il coautore Ian Good, un Studentessa di dottorato UW nel dipartimento di ingegneria meccanica.
I ricercatori hanno eseguito 10 pickup di prova con 22 forme. Per 16 forme, tutti e 10 i pickup hanno avuto successo. Mentre la maggior parte delle forme aveva almeno un pickup riuscito, due no. Questi guasti derivavano da problemi con i modelli 3D degli oggetti che erano stati dati al computer. Per uno, una ciotola, il modello ha descritto i lati della ciotola come più sottili di quanto non fossero. Per l'altro, un oggetto che sembra una tazza con un manico a forma di uovo, il modello non aveva il suo orientamento corretto.
L'algoritmo ha sviluppato le stesse strategie di presa per oggetti di forma simile, anche senza alcun intervento umano. I ricercatori sperano che ciò significhi che saranno in grado di creare pinze passive in grado di raccogliere una classe di oggetti, invece di dover avere una pinza unica per ogni oggetto.
Una limitazione di questo metodo è che le pinze passive non possono essere progettate per raccogliere tutti gli oggetti. Sebbene sia più facile raccogliere oggetti di larghezza variabile o con bordi sporgenti, gli oggetti con superfici uniformemente lisce, come una bottiglia d'acqua o una scatola, sono difficili da afferrare senza parti mobili.
Tuttavia, i ricercatori sono stati incoraggiati a vedere che l'algoritmo funziona così bene, specialmente con alcune delle forme più difficili, come una colonna con un buco della serratura in alto.
"Il percorso che il nostro algoritmo ha trovato per quello è una rapida accelerazione fino al punto in cui si avvicina molto all'oggetto. Sembrava che stesse per schiantarsi contro l'oggetto, e ho pensato:"Oh no. E se non lo avessimo calibrato bene?'", ha detto Good. "E poi ovviamente si avvicina incredibilmente e poi lo raccoglie perfettamente. È stato questo momento maestoso, un'estrema montagna russa di emozioni".
Yu Lou, che ha completato questa ricerca come studente di un master alla Allen School, è anche un coautore di questo articolo.