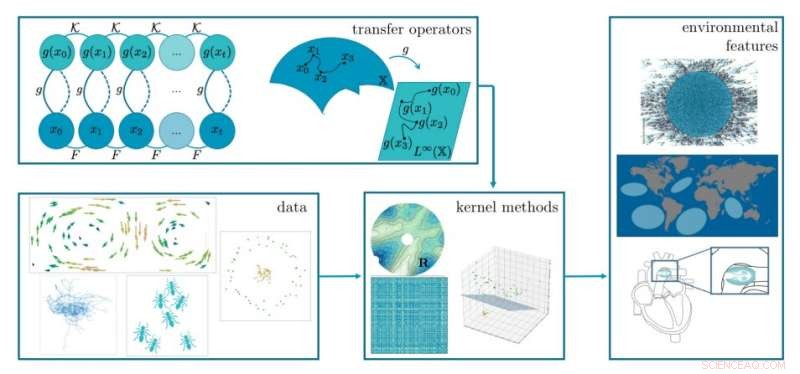
Diagramma dell'interazione tra dati, operatori di trasferimento, metodi del kernel e caratteristiche ambientali. Gli operatori di trasferimento rappresentano sistemi dinamici, dove uno stato x ∈ X è elevato in uno spazio L∞X e g(x) fornisce proprietà fisiche del sistema. Molti sistemi sono definiti da dati che mostrano schemi complessi, come due anelli annidati, flussi negli oceani, traiettorie di taxi e comportamenti biologici. I metodi del kernel trasformano questi dati in uno spazio alternativo con l'uso delle funzioni del kernel. I dati sono quindi più facili da interpretare, ad esempio separando due anelli annidati o creando una matrice di Gram da utilizzare in un algoritmo del kernel. Gli operatori di trasferimento sono rappresentati attraverso i metodi del kernel incorporando sistemi dinamici in uno spazio del kernel, gli algoritmi R. Kernel estraggono le caratteristiche ambientali dagli operatori di trasferimento, come dove gli esseri umani tendono a radunarsi in mezzo alla folla, aree di vortici negli oceani o schemi di flusso sanguigno nei cuori . Credito:Salam, Edwards e Hsieh.
Negli ultimi anni, i robotici hanno creato una varietà di sistemi che potrebbero eventualmente operare in ambienti del mondo reale. Poiché la maggior parte delle impostazioni del mondo reale, in particolare gli spazi pubblici, sono dinamici e imprevedibili, per navigare in modo efficiente in questi ambienti i robot dovrebbero essere in grado di acquisire una buona comprensione di ciò che li circonda.
I ricercatori del GRASP Laboratory dell'Università della Pennsylvania hanno recentemente condotto uno studio per indagare su come le caratteristiche relative a un determinato ambiente possono aumentare la consapevolezza di un robot e la sua capacità di navigare nell'ambiente circostante. Il loro articolo, pre-pubblicato su arXiv, si basava su due dei loro precedenti sforzi di ricerca.
Il primo di questi studi precedenti ha introdotto una serie di strategie che utilizzavano le informazioni ambientali per migliorare l'autonomia di un robot nel competere in un compito specifico, vale a dire la localizzazione della fonte di una fuoriuscita di sostanze chimiche in flussi turbolenti. Come parte del secondo studio, invece, il team ha introdotto nuove politiche di controllo a livello di agente che sfruttavano le caratteristiche ambientali o il rumore per mantenere la distribuzione spaziale desiderata dell'agente robotico di rilevamento in un ambiente di flusso geofisico.
"I nostri precedenti lavori si sono concentrati sulle strutture coerenti lagrangiane, una caratteristica importante dei sistemi dinamici in molte applicazioni come l'oceanografia e la previsione meteorologica, e su come possono essere utilizzate nella robotica", ha detto Tahiya Salam, uno dei ricercatori che ha condotto lo studio TechXplore. "Il nostro nuovo lavoro si concentra su come una funzionalità simile, insiemi coerenti, può essere appresa online e nuovi approcci su come queste funzionalità possono essere utilizzate nelle applicazioni robotiche, come il monitoraggio della folla negli ambienti urbani e la navigazione in acqua ad alta efficienza energetica."
Nel loro nuovo studio, Salam e gli altri ricercatori del Laboratorio GRASP hanno utilizzato una serie di tecniche che combinano approcci dinamici globali con l'apprendimento automatico. In questo contesto, il termine "dinamica globale" si riferisce alle dinamiche complessive di un dato ambiente e alle caratteristiche che caratterizzano queste dinamiche.
"La tecnica che abbiamo utilizzato ci ha permesso di apprendere le caratteristiche globali dai dati raccolti dagli ambienti in cui operano i robot", ha spiegato Salam. "Le funzionalità globali, chiamate insiemi coerenti, hanno proprietà interessanti; in particolare rappresentano regioni che si disperdono molto lentamente. Utilizzando queste informazioni sulle regioni che si disperdono molto lentamente, i robot possono sfruttare queste funzionalità per il processo decisionale."
Salam e i suoi colleghi hanno calcolato online questi cosiddetti "insiemi coerenti" utilizzando tecniche di apprendimento automatico. Successivamente hanno progettato un framework in grado di controllare i comportamenti di un robot in base alle caratteristiche ambientali che hanno calcolato.
"Abbiamo trovato un modo per calcolare insiemi coerenti in tempo reale senza avere informazioni dettagliate su un modello che descrive l'ambiente", ha spiegato Salam. "Inoltre, siamo stati in grado di utilizzare questi set coerenti in modi intelligenti per ottenere comportamenti intelligenti dei robot."
Salam e i suoi colleghi hanno valutato la struttura che hanno sviluppato in una serie di esperimenti e hanno scoperto che supera significativamente le prestazioni dei metodi offline per il calcolo delle caratteristiche ambientali. Il team ha dimostrato in modo specifico l'efficacia del modello sviluppato in due scenari in cui i robot hanno monitorato gli ambienti urbani e navigato sull'acqua.
In futuro, la struttura introdotta da questo team di ricercatori potrebbe in definitiva aiutare a migliorare la capacità dei robot esistenti ed emergenti di navigare in ambienti sconosciuti e dinamici. Nel frattempo, Salam intende esplorare ulteriormente il potenziale dell'utilizzo delle funzionalità ambientali per migliorare la navigazione dei robot.
"Nei miei prossimi studi, continuerò a studiare le tecniche che collegano le dinamiche globali e l'apprendimento automatico in contesti più generali", ha aggiunto Salam. "Ad esempio, vorrei rappresentare la dinamica globale di ambienti arbitrari dalle misurazioni dei sensori raccolte dai robot".