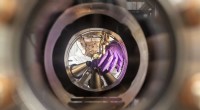
Una trappola ionica utilizzata per la ricerca presso il Sydney Nanoscience Hub Quantum Control Laboratory dell'Università di Sydney. Credito:Università di Sydney
Gli scienziati dell'Università di Sydney hanno adattato le tecniche dei veicoli autonomi e della robotica per valutare in modo efficiente le prestazioni dei dispositivi quantistici, un processo importante per aiutare a stabilizzare le tecnologie emergenti.
L'approccio innovativo ha dimostrato sperimentalmente di superare la caratterizzazione semplicistica di questi ambienti di un fattore tre, con un risultato molto più alto per ambienti simulati più complessi.
"Utilizzando questo approccio, possiamo mappare il "rumore" che causa variazioni delle prestazioni tra dispositivi quantistici almeno tre volte più velocemente di un approccio a forza bruta, " ha detto l'autore principale Riddhi Gupta, un dottorato di ricerca studente della Facoltà di Fisica. "Valutare rapidamente l'ambiente acustico può aiutarci a migliorare la stabilità complessiva dei dispositivi quantistici".
La ricerca è stata pubblicata sulla rivista Nature partner Informazioni quantistiche .
L'informatica quantistica è ancora nelle sue prime fasi di sviluppo, ma promette di rivoluzionare la tecnologia risolvendo problemi che vanno oltre l'ambito dell'informatica classica.
Uno degli ostacoli allo sviluppo di questi sistemi su scala pratica è il superamento delle imperfezioni dell'hardware. Le unità di base della tecnologia quantistica:bit quantistici, o qubit:sono altamente sensibili ai disturbi provenienti dal loro ambiente, come il "rumore" elettromagnetico, e mostrano variazioni di prestazioni che ne riducono l'utilità.
Signora Gupta, anche parte dell'ARC Center of Excellence for Engineered Quantum Systems, ha preso tecniche dalla stima classica utilizzata nella robotica e le ha adattate per migliorare le prestazioni dell'hardware. Ciò si ottiene attraverso l'automazione efficiente dei processi che mappano sia l'ambiente che le variazioni delle prestazioni tra grandi dispositivi quantistici.
"La nostra idea era di adattare gli algoritmi utilizzati nella robotica che mappano l'ambiente e posizionano un oggetto rispetto ad altri oggetti nel loro terreno stimato, " ha detto. "Utilizziamo efficacemente alcuni qubit nel dispositivo come sensori per aiutare a comprendere il terreno classico in cui altri qubit stanno elaborando le informazioni".
Nella robotica, le macchine si affidano alla localizzazione e alla mappatura simultanee, o SLAM, algoritmi. Dispositivi come gli aspirapolvere robotici mappano continuamente i loro ambienti, quindi stimano la loro posizione all'interno di quell'ambiente per potersi spostare.
La difficoltà nell'adattare gli algoritmi SLAM ai sistemi quantistici è che se misuri, o caratterizzare, le prestazioni di un singolo qubit, distruggi le sue informazioni quantistiche.
Ciò che la signora Gupta ha fatto è sviluppare un algoritmo adattivo che misura le prestazioni di un qubit e utilizza tali informazioni per stimare le capacità dei qubit vicini.
"L'abbiamo chiamata "Mappatura del rumore per architetture quantistiche". Piuttosto che stimare l'ambiente classico per ogni singolo qubit, siamo in grado di automatizzare il processo, riducendo il numero di misurazioni e qubit richiesti, che velocizza l'intero processo, "Ha detto la signora Gupta.
Dottor Cornelius Hempel, il cui team sperimentale ha fornito alla sig.ra Gupta dati provenienti da esperimenti su una stringa unidimensionale di ioni intrappolati, ha detto di essere contento di vedere un triplice miglioramento anche nella mappatura di un sistema quantistico così piccolo.
"Però, quando Riddhi modellò questo processo in un sistema più ampio e complesso, il miglioramento della velocità è stato di venti volte superiore. Questo è un ottimo risultato dato che il futuro dell'elaborazione quantistica è nei dispositivi più grandi, " Egli ha detto.
Il supervisore della signora Gupta è il professor Michael J. Biercuk, fondatore della società di tecnologia quantistica Q-CTRL e direttore del Quantum Control Laboratory dell'Università di Sydney nel Sydney Nanoscience Hub.
Ha detto:"Questo lavoro è un'entusiasmante dimostrazione che la conoscenza all'avanguardia della robotica può plasmare direttamente il futuro dell'informatica quantistica. Questo è stato un primo passo per unificare i concetti di questi due campi, e vediamo un futuro molto luminoso per il continuo sviluppo dell'ingegneria del controllo quantistico".