Richard Feynman aveva ragione:c'è molto spazio in fondo, e il bip, i pesanti bidoni della fantascienza degli anni '50 stanno gradualmente lasciando il posto a micro-droidi delle dimensioni di un granello di polvere. . . o anche una molecola.
Ma questa nuova generazione di robot invisibilmente minuscoli solleva una nuova domanda:come si può spremere anche un'intelligenza rudimentale in qualcosa la cui parte mobile più grande è costituita da una manciata di atomi? Una soluzione, dice Nadine Dabby, studentessa laureata in informatica e sistemi neurali del Caltech, è invece quello di costruire l'intelligenza nell'ambiente.
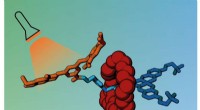
Alla conferenza TEDxCaltech di gennaio, Dabby presenterà un robot a una molecola in grado di seguire una scia di briciole di pane chimiche. Un documento di cui è stata co-autrice Natura lo scorso maggio descrive un "ragno molecolare" che può essere indotto a "camminare" lungo un percorso predeterminato.
Le "zampe" del ragno sono costituite da brevi segmenti di DNA, così come le "molecole substrato" che compongono il percorso, ognuno dei quali è ancorato ad un'estremità come un filo d'erba. La gamba e il substrato possono legarsi insieme temporaneamente, ma questo processo lascia il substrato leggermente meno "appiccicoso" di quanto non fosse in precedenza, e la prossima tappa che lo contatta non si terrà così a lungo. Quella sottile differenza nella viscosità è ciò che produce il comportamento di camminata del robot. Senza senso dell'orientamento, Piano, o scopo, le sue gambe svolazzano continuamente intorno a caso, come quelli del proverbiale ubriacone negli studi di probabilità. Ma poiché sono tenuti meno saldamente dal substrato che è stato precedentemente visitato, il movimento complessivo tende a procedere in avanti.
Il percorso del breadcrumb è disposto sulla superficie di una biomolecola autoassemblante, generato da un processo chiamato "DNA origami". Sviluppato al Caltech nel laboratorio di bioingegneria di Erik Winfree dall'allora postdoc Paul W. K. Rothemund (ora socio di ricerca senior), questa tecnica intreccia un singolo filamento di DNA in un rettangolo che riempie lo spazio. Lunghi tratti paralleli alternati a brusche inversioni a U creano uno schema che ricorda il percorso avanti e indietro di un contadino che ara un campo.
Per cementare il DNA intrecciato in posizione, vengono aggiunti diversi frammenti di DNA molto più brevi; questi "fili di fiocco" si legano in posizioni specifiche lungo la lunghezza della molecola intrecciata, stringendo i percorsi adiacenti come fascette attorno a un cavo di alimentazione. E quei filamenti di base hanno una seconda funzione:fungono da ancore per le molecole di substrato che definiscono il percorso. La ruvida griglia 16 x 12 in cui cadono non è abbastanza densa da creare labirinti molto elaborati, ma ha permesso ai ricercatori di impostare alcuni rettilinei, alcune curve, e una brusca svolta o due.
tecnicamente, il ragno non ha otto zampe ma quattro, e cammina solo su tre di questi. Il quarto è usato per legare la molecola alla sua posizione iniziale, fino a quando un segnale chimico dei ricercatori non rompe il legame e fa partire il robot. (Immagina un'iguana a tre zampe legata a un palo; il guinzaglio si spezza, e la creatura inciampa sulle sue gambe gommose.)
E che aspetto ha un nano-bot in azione? Utilizzando marcatori fluorescenti e microscopia a forza atomica, il team ha prodotto con successo un "filmato" breve e piuttosto granuloso di un ragno che si fa strada con i piedi appiccicosi lungo il sentiero del giardino.
Con un ritmo misurato in nanometri al minuto, è improbabile che il piccolo viaggiatore infrangerà alcun record di velocità su terra. Tuttavia, Dabby muse, dato alcuni miglioramenti alla sua capacità di interpretare e alterare il suo ambiente molecolare, il robot potrebbe funzionare come un computer biologico, l'esecuzione di algoritmi arbitrariamente complessi.
Quel primo piccolo passo verso una minuscola scia di DNA potrebbe rappresentare un balzo da gigante per il tipo di bot.