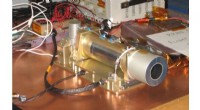
I ricercatori del MIT implementano un veicolo subacqueo autonomo per testare nuovi algoritmi di navigazione e rilevamento. Credito:MSEAS
L'osservazione degli oceani del mondo è sempre più una missione assegnata a veicoli subacquei autonomi (AUV), robot marini progettati per andare alla deriva, unità, o planare attraverso l'oceano senza alcun input in tempo reale da parte degli operatori umani. Le domande critiche a cui gli AUV possono aiutare a rispondere sono dove, quando, e cosa campionare per i dati più informativi, e come raggiungere in modo ottimale le posizioni di campionamento.
Gli ingegneri del MIT hanno ora sviluppato sistemi di equazioni matematiche che prevedono i dati più informativi da raccogliere per una determinata missione di osservazione, e il modo migliore per raggiungere i siti di campionamento.
Con il loro metodo, i ricercatori possono prevedere il grado in cui una variabile, come la velocità delle correnti oceaniche in un determinato luogo, rivela informazioni su qualche altra variabile, come la temperatura in qualche altro luogo, una quantità chiamata "informazione reciproca". Se il grado di mutua informazione tra due variabili è alto, un AUV può essere programmato per andare in determinate posizioni per misurare una variabile, per ottenere informazioni sull'altro.
Il team ha usato le loro equazioni e un modello oceanico che hanno sviluppato, denominata Simulazione multidisciplinare, Stima, e sistemi di assimilazione (MSEAS), in esperimenti in mare per prevedere con successo campi di informazioni reciproche e guidare gli AUV effettivi.
"Non tutti i dati sono uguali, "dice Arkopal Dutt, uno studente laureato presso il Dipartimento di Ingegneria Meccanica del MIT. "I nostri criteri... consentono alle macchine autonome di individuare le posizioni dei sensori e i tempi di campionamento in cui è possibile effettuare le misurazioni più informative".
Per determinare come raggiungere in modo sicuro ed efficiente le destinazioni di campionamento ideali, i ricercatori hanno sviluppato un modo per aiutare gli AUV a utilizzare l'attività incerta dell'oceano, prevedendo un "fronte di raggiungibilità", una regione tridimensionale dinamica dell'oceano che un AUV avrebbe garantito di raggiungere entro un certo tempo, dati i vincoli di potenza dell'AUV e le correnti oceaniche. Il metodo del team consente a un veicolo di navigare in correnti che lo avvicinerebbero alla sua destinazione, ed evitare quelli che lo sbandirebbero.
Quando i ricercatori hanno confrontato le loro previsioni di raggiungibilità con le rotte degli AUV reali che osservano una regione del Mar Arabico, hanno trovato che le loro previsioni corrispondevano a dove i veicoli erano in grado di navigare, per lunghi periodi di tempo.
In definitiva, i metodi del team dovrebbero aiutare i veicoli a esplorare l'oceano in modo intelligente, modo efficiente dal punto di vista energetico.
"I robot marini autonomi sono i nostri esploratori, sfidando il mare agitato per raccogliere dati per noi, ", afferma lo studente laureato in ingegneria meccanica Deepak Subramani. "Le nostre equazioni matematiche aiutano gli scout a raggiungere le posizioni desiderate e a ridurre il consumo di energia utilizzando in modo intelligente le correnti oceaniche".
I ricercatori, guidato da Pierre Lermusiaux, professore di ingegneria meccanica e scienza e ingegneria oceanica al MIT, hanno esposto i loro risultati in un articolo che presto apparirà in un volume della serie di libri, "Il mare, " pubblicato dal Journal of Marine Research.
Oltre a Dutt e Subramani, La squadra di Lermusiaux include Jing Lin, Chinmay Kulkarni, Abhinav Gupta, Tapovan Lolla, Patrick Haley, Wael Hajj Ali, Chris Mirabito, e Sudip Jana, tutti dal Dipartimento di Ingegneria Meccanica.
Alla ricerca dei dati più informativi
Per convalidare il loro approccio, i ricercatori hanno dimostrato di poter prevedere con successo le misurazioni più informative per una serie di obiettivi diversi. Per esempio, prevedevano le osservazioni ottimali per testare ipotesi scientifiche, imparare se le equazioni del modello oceanico sono corrette o meno, stimare i parametri degli ecosistemi marini, e rilevare la presenza di strutture coerenti nell'oceano. Hanno confermato che le loro osservazioni ottimali erano dal 50 al 150 percento più informative di un'osservazione media.

Gli scienziati si preparano a caricare un AUV su una nave da ricerca per un test di navigazione e algoritmi di rilevamento in mare. Credito:MSEAS
Per raggiungere i luoghi di osservazione ottimali, Gli AUV devono navigare attraverso l'oceano. Tradizionalmente, la pianificazione dei percorsi per i robot è stata eseguita in ambienti relativamente statici. Ma pianificare attraverso l'oceano è una storia diversa, poiché forti correnti e vortici possono cambiare costantemente, essere incerto, e spingere un veicolo fuori dalla sua rotta prestabilita.
Il team del MIT ha quindi sviluppato algoritmi di pianificazione del percorso partendo da principi fondamentali tenendo presente l'oceano. Hanno modificato un'equazione esistente, nota come equazione di Hamilton-Jacobi, per determinare il fronte di raggiungibilità di un AUV, o il perimetro più lontano che un veicolo può raggiungere in un determinato lasso di tempo. L'equazione si basa su tre variabili principali:tempo, i vincoli di propulsione specifici di un veicolo, e avvezione, o il trasporto da parte delle correnti oceaniche dinamiche, una variabile che il gruppo prevede utilizzando il suo modello oceanico MSEAS.
Con il nuovo sistema, gli AUV possono tracciare i percorsi più informativi fattibili e adattare i loro piani di campionamento mentre le correnti oceaniche incerte cambiano nel tempo. In un primo grande, prova in mare aperto, il team ha calcolato i fronti probabilistici di raggiungibilità e i percorsi più informativi per galleggianti e alianti autonomi nell'Oceano Indiano, nell'ambito dell'iniziativa di ricerca autonoma sulla circolazione del Mar Arabico settentrionale (NASCar) dell'Ufficio di ricerca navale (ONR).
Per diversi mesi, i ricercatori, lavorando fuori dai loro uffici del MIT, ha fornito previsioni giornaliere di raggiungibilità al team dell'ONR per aiutare a guidare i veicoli sottomarini, raccogliere osservazioni ottimali lungo il percorso.
"In pratica non dormiva molto, " Lermusiaux ricorda. "Le previsioni erano da tre a sette giorni fuori, e noi assimileremmo i dati e li aggiorneremmo ogni giorno. Abbiamo fatto abbastanza bene. In media, gli alianti e i galleggianti sono finiti dove desiderato e all'interno delle aree probabilistiche che avevamo previsto."
Un momento di verità ripaga
Lermusiaux e i suoi colleghi hanno anche utilizzato i loro sistemi per pianificare "percorsi temporali ottimali", traiettorie che avrebbero portato un AUV in una determinata posizione nel più breve tempo possibile, date le condizioni delle correnti oceaniche previste.
Con i colleghi del MIT Lincoln Laboratory e della Woods Hole Oceanographic Institution, hanno testato questi percorsi ottimali in tempo reale tenendo "gare" tra AUV identici a propulsione, al largo della costa di Martha's Vineyard. In ogni gara, il percorso di un AUV è stato determinato dal percorso ottimale in termini di tempo del team, mentre un altro AUV ha seguito un percorso con la distanza più breve alla stessa destinazione.
"Era teso:chi vincerà?" Subramani ricorda. "Questo è stato il momento della verità per noi, dopo tutti quegli anni di sviluppo teorico con equazioni e dimostrazioni matematiche."
Il lavoro della squadra è stato ripagato. In ogni gara, l'AUV operante secondo le previsioni del team ha raggiunto per primo la sua destinazione, prestazioni di circa il 15% più veloci rispetto all'AUV concorrente. Il pronostico della squadra ha aiutato l'AUV vincente ad evitare forti correnti che a volte hanno agito per bloccare l'altro AUV.
"È stato stupefacente, " dice Kulkarni. "Anche se fisicamente i due sentieri erano solo a meno di un miglio di distanza, seguendo le nostre previsioni ha dato fino al 15% di riduzione dei tempi di viaggio. Dimostra che i nostri percorsi sono davvero ottimali per i tempi".
Tra le altre applicazioni, Lermusiaux, come membro del Tata Center for Technology and Design del MIT, applicherà i suoi metodi di previsione oceanica per guidare le osservazioni al largo della costa dell'India, dove i veicoli avranno il compito di monitorare la pesca per fornire un sistema di gestione potenzialmente a basso costo.
"Gli AUV non sono molto veloci, e la loro autonomia non è infinita, quindi bisogna proprio tener conto delle correnti e delle loro incertezze, e modellare le cose rigorosamente, " Dice Lermusiaux. "L'intelligenza artificiale per questi sistemi autonomi deriva dalla derivazione rigorosa e dalla fusione di equazioni e principi differenziali governativi con la teoria del controllo, teoria dell'informazione, e apprendimento automatico."
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.