Autosub Long Range 6000 AUV del National Oceanography Centre, prima dello spiegamento sotto la piattaforma di ghiaccio FilchnerRonne in Antartide. Credito:Sprague et al.
I ricercatori del Royal Institute of Technology (KTH) e del National Oceanography Center hanno recentemente utilizzato alberi comportamentali (BT) per progettare strutture modulari, versatile, e robuste architetture di controllo per missioni critiche. Il loro studio, pre-pubblicato su arXiv, ha applicato specificamente un framework BT al sistema di controllo dei veicoli subacquei autonomi (AUV).
Gli AUV sono veicoli sottomarini utilizzati per una varietà di missioni, come il rilevamento e la mappatura di oggetti sommersi o l'identificazione di pericoli e ostacoli alla navigazione. A causa delle limitazioni nella larghezza di banda e nel raggio di comunicazione, questi veicoli non possono fare affidamento su soluzioni di teleoperazione utilizzate da robot aerei o operanti a terra.
Inoltre, Gli AUV sono generalmente distribuiti in aree remote, quindi recuperarli dopo un malfunzionamento è spesso molto impegnativo e costoso. Per affrontare queste sfide, I sistemi di controllo AUV dovrebbero essere sia robusti che versatili, garantendo la sicurezza del veicolo e adattandosi alle diverse situazioni.
Il team di ricercatori del KTH e del National Oceanography Center ha cercato di affrontare queste sfide utilizzando alberi comportamentali (BT), modelli matematici che recentemente sono diventati sempre più popolari nel campo dell'intelligenza artificiale e della robotica. I BT sono stati inizialmente sviluppati per i videogiochi per aumentare la modularità delle strutture di controllo dei personaggi non giocanti (NPC).
"Questa modularità consente test efficienti, progettazione di funzionalità incrementali e riutilizzo del codice, tutto ciò è stato piuttosto vantaggioso nell'industria dei videogiochi, "Christopher Iliffe Sprague, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Allo stesso modo, troviamo questi aspetti molto utili nella progettazione dell'intelligenza artificiale robotica (AI), i principali vantaggi sono che i comportamenti possono essere riutilizzati e testati nel contesto di altri comportamenti di livello superiore senza specificare la loro relazione con i comportamenti successivi. Questi sono vantaggi sorprendenti rispetto alle macchine a stati finiti più convenzionali".
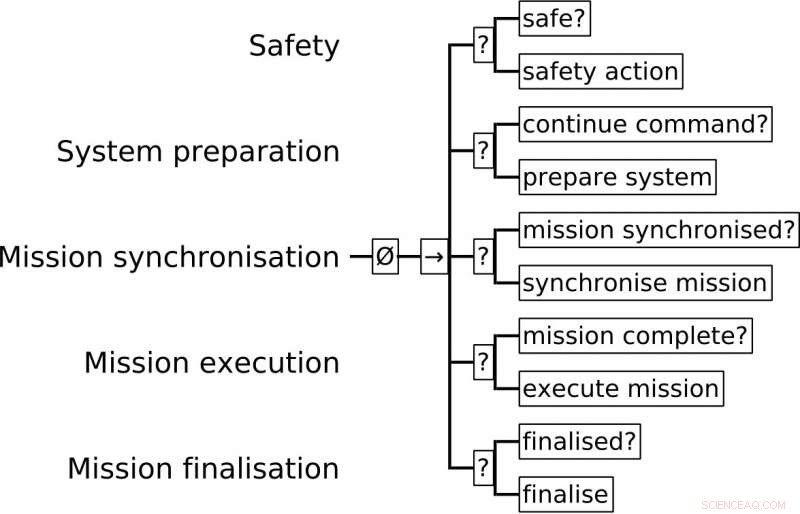
Sistema mission critical generale BT. La robustezza si ottiene controllando sempre le condizioni di sicurezza e intraprendendo le azioni appropriate quando necessario. Credito:Sprague et al.
Essenzialmente, I BT forniscono una struttura gerarchica per il passaggio da un'attività all'altra. Nei sistemi mission-critical, come veicoli da ricognizione o auto a guida autonoma, un obiettivo smisurato può spesso essere suddiviso in più sottocompiti. Perciò, I BT potrebbero aiutare a strutturare meglio questi compiti e passare da uno all'altro.
"Con la struttura gerarchica intrinseca dei BT, i compiti possono essere scomposti in un diverso grado di specificità, Sprague ha spiegato. "Nel nostro giornale, lo mostriamo nel contesto degli AUV che hanno il compito di eseguire una missione definita da una sequenza di waypoint. Per prima cosa definiamo generalmente un BT che soddisfa i requisiti del dominio del sistema (cioè veicoli subacquei), quindi perfezionare ulteriormente il BT aggiungendo attività secondarie relative a obiettivi specifici."
Sprague e i suoi colleghi hanno applicato questo processo di perfezionamento BT a una missione AUV svolta dall'Istituto nazionale di oceanografia. La loro struttura BT ha reso i sistemi di controllo AUV più robusti, monitorare la loro sicurezza prima di procedere ad altri compiti successivi. I BT hanno anche consentito una maggiore versatilità, dando priorità alle attività secondarie e consentendo al sistema di passare da una all'altra in modo flessibile.
"Il più significativo dei risultati del nostro studio è che abbiamo mostrato come gli alberi comportamentali possono essere prima delineati per soddisfare i requisiti generali del dominio e poi ulteriormente perfezionati per missioni specifiche, senza sacrificare la struttura dell'albero originale, " Ha detto Sprague. "La conclusione cruciale di questo è che si possono instillare determinate priorità di compiti, la sicurezza è la cosa più cruciale, e conservarli, non importa quanto l'albero diventi specifico della missione."
Sprague e i suoi colleghi hanno dimostrato con successo i vantaggi dell'utilizzo di BT per il controllo di sistemi mission-critical, come gli AUV. Però, il grado in cui le attività possono essere astratte utilizzando i BT è ancora limitato dalla capacità degli esseri umani di identificare le scomposizioni delle attività. Mentre in alcuni casi le attività possono essere suddivise in modo intuitivo, in altri i comportamenti del sistema sono molto più complessi.
"Ora cerchiamo di sintetizzare automaticamente i BT dall'esempio, con in mente l'ottimalità, " ha detto Sprague. "In un altro documento, abbiamo studiato come implementare il controllo ottimale con metodi di apprendimento automatico per compiti specifici. Ora vorremmo indagare sull'utilizzo di tali metodi per identificare e ottimizzare le attività e le strutture ad albero complessive dall'esempio. Sospettiamo che questo rivelerà comportamenti difficili da identificare da parte degli esseri umani".
© 2018 Science X Network