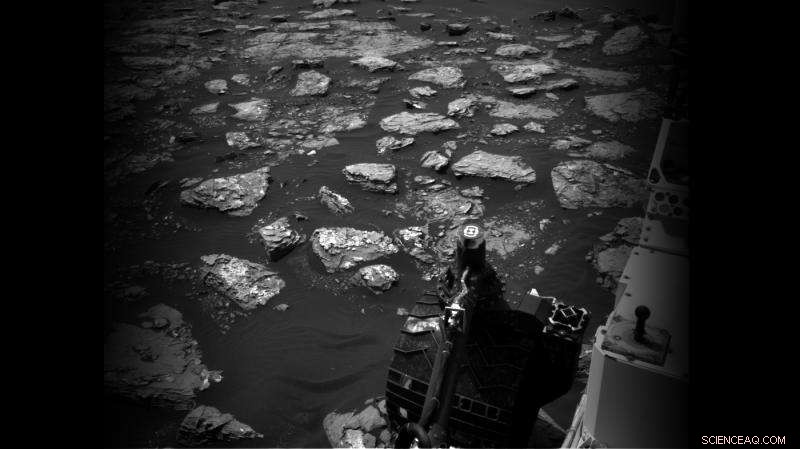
Questo 2 dicembre 2016, la vista dalla telecamera di navigazione (Navcam) sull'albero del Curiosity Mars Rover della NASA mostra il terreno roccioso in vista mentre il rover stava lavorando in un sito di perforazione chiamato "Precipice" sul Monte Sharp inferiore. Credito:NASA/JPL-Caltech
Il rover Curiosity Mars della NASA sta studiando l'ambiente circostante e monitorando l'ambiente, piuttosto che guidare o usare il braccio per la scienza, mentre il team del rover diagnostica un problema con un motore che muove la trivella del rover.
Curiosity si trova in un sito sul Monte Sharp inferiore selezionato per quella che sarebbe la settima perforazione della raccolta di campioni della missione del 2016. Il team del rover ha appreso il 1 dicembre che Curiosity non ha completato i comandi per la perforazione. Il rover ha rilevato un guasto in una fase iniziale in cui il meccanismo di "alimentazione del trapano" non ha esteso il trapano per toccare il bersaglio di roccia con la punta.
"Stiamo definendo una serie di test diagnostici per valutare attentamente il meccanismo di alimentazione del trapano. Stiamo usando il nostro rover di prova qui sulla Terra per provare questi test prima di eseguirli su Marte, " Curiosity Vice Project Manager Steven Lee, al Jet Propulsion Laboratory della NASA a Pasadena, California, detto lunedì. "Per essere prudenti, finché non eseguiamo i test su Curiosity, vogliamo limitare eventuali cambiamenti dinamici che potrebbero influenzare la diagnosi. Ciò significa non muovere il braccio e non guidare, che potrebbe scuoterlo."
Due tra le possibili cause valutate sono che un freno sul meccanismo di alimentazione del trapano non si è disinserito completamente o che un encoder elettronico per il motore del meccanismo non ha funzionato come previsto. Lee ha affermato che potrebbero esistere soluzioni alternative per entrambi gli scenari, ma il primo passo è identificare il motivo per cui il motore non ha funzionato correttamente la scorsa settimana.
Il meccanismo di alimentazione del trapano spinge la parte anteriore del trapano verso l'esterno dalla torretta degli strumenti all'estremità del braccio robotico di Curiosity. Il trapano raccoglie la roccia in polvere che viene analizzata da strumenti di laboratorio all'interno del rover. Mentre i movimenti del braccio e la guida sono in attesa, il rover sta usando telecamere e uno spettrometro sul suo albero, e una suite di funzionalità di monitoraggio ambientale.
Nella posizione attuale del rover, ha percorso 9,33 miglia (15,01 chilometri) da quando è atterrato all'interno del cratere Gale di Marte nell'agosto 2012. Ciò include più di mezzo miglio (più di 840 metri) da quando è partito un gruppo di mesas e butte panoramici, chiamati "Murray Buttes", in Settembre 2016. Curiosity ha scalato 541 piedi (165 metri) di elevazione dall'atterraggio, inclusi 144 piedi (44 metri) dalla partenza di Murray Buttes.
Il rover sta scalando in sequenza gli strati più alti e più giovani del Monte Sharp inferiore per indagare su come è cambiato l'antico clima della regione, miliardi di anni fa. Gli indizi sulle condizioni ambientali sono registrati negli strati rocciosi. Durante il suo primo anno su Marte, la missione è riuscita nel suo obiettivo principale scoprendo che la regione un tempo offriva condizioni ambientali favorevoli alla vita microbica, se Marte ha mai ospitato la vita. Le condizioni negli antichi ambienti lacustri marziani di acqua dolce di lunga durata includevano tutti gli elementi chimici chiave necessari per la vita come la conosciamo, più una fonte chimica di energia che viene utilizzata da molti microbi sulla Terra.
trapano di curiosità, utilizzato in tutti e 15 i bersagli di roccia perforati finora, combina l'azione del martellamento e l'azione della punta rotante per penetrare nei bersagli e raccogliere il materiale del campione. Il tentativo di perforazione della scorsa settimana è stato pianificato come il primo della missione utilizzando un metodo di perforazione senza percussione che si basa solo sull'azione rotante del trapano. Il cortocircuito nel meccanismo di percussione si è verificato in modo intermittente e imprevedibile diverse volte dalla prima volta nel febbraio 2015.
"Abbiamo ancora a disposizione le percussioni, ma vorremmo essere cauti e usarlo per obiettivi dove ne abbiamo davvero bisogno, e altrimenti usa solo la rotazione dove questo può darci un campione, ", ha affermato Ashwin Vasavada, scienziato del progetto Curiosity, del JPL.