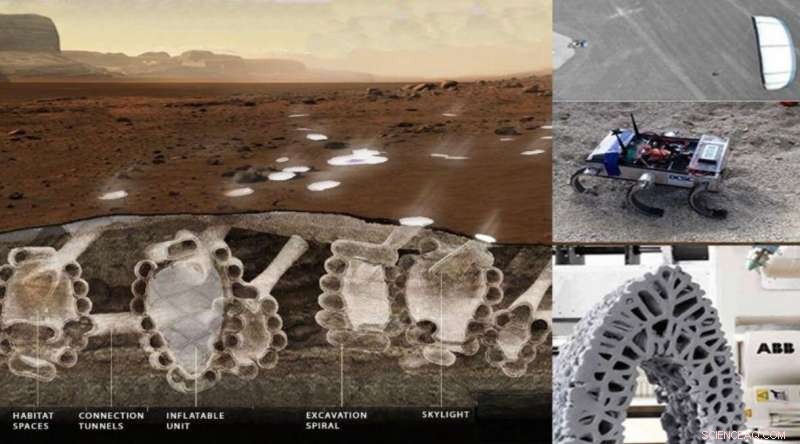
Concetto di un habitat sotterraneo e dei robot e delle fonti di energia che lo costruiranno e lo alimenteranno. Credito:Bier et al.
Gli habitat sotterranei sono recentemente diventati un punto focale degli sforzi di colonizzazione fuori dal pianeta. Protezione da micrometeoriti, radiazioni e altri potenziali pericoli rendono i siti sotterranei desiderabili rispetto alle abitazioni di superficie. La costruzione di tali strutture sotterranee presenta una miriade di sfide, non ultimo dei quali è come costruirli effettivamente. Un team di ricercatori della Delft University of Technology (TUD) sta lavorando a un piano per scavare materiale e utilizzarlo per stampare gli habitat. Tutto ciò che sarebbe stato fatto con un gruppo di robot brulicanti.
L'idea nasce da un'opportunità di sovvenzione postata dall'Agenzia spaziale europea. Studenti del Robotic Building lab (RB) della TU Delft, guidato dalla dottoressa Henriette Bier, erano entusiasti di partecipare alla sfida che si concentra sull'utilizzo delle risorse in situ per la costruzione fuori dalla Terra. La squadra RB, insieme ad esperti in scienze dei materiali, robotica, e l'ingegneria aerospaziale ha presentato un'idea a cui sono stati concessi € 100.000 per sviluppare una prova preliminare di concetto.
L'approccio proposto si concentra sulla specialità del laboratorio, la costruzione robotica, e ha quattro componenti principali:scavare la regolite, stampare un nuovo habitat utilizzando un processo di produzione additiva, coordinare il lavoro tra tutti i robot che sarebbero necessari per completare i compiti, e alimentandoli così come l'habitat.
Lo scavo della regolite con i robot è stato esplorato in precedenza, ma di solito nel contesto della luna. Diversi modelli di scavo sono utili per costruire strutture diverse, e il modello su cui si è concentrato il team RB era una spirale inclinata verso il basso. Una tale struttura potrebbe creare uno stabile, struttura sicura all'interno di un ingombro relativamente ridotto sulla superficie.
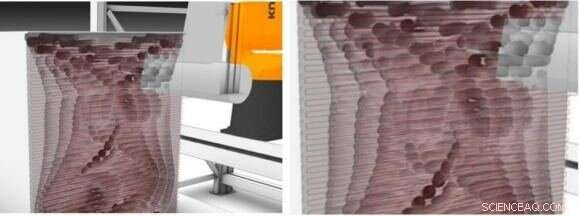
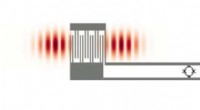
Esempio di alcuni dei percorsi utensile sottrattivi che verrebbero utilizzati per scavare i tunnel dell'habitat. Credito:Bier et al.
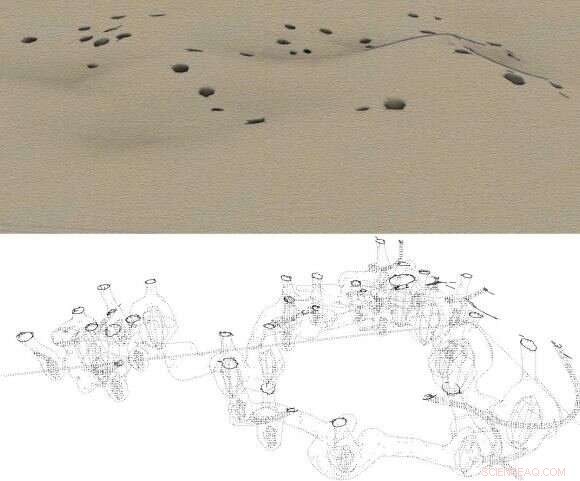
Un esempio dell'habitat "rizoma" che avrebbe un'area esposta relativamente piccola in superficie ma fornirebbe un ampio spazio abitabile sotterraneo. Credito:Bier et al.
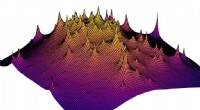
La modellazione delle sollecitazioni e delle deformazioni su tale struttura è una componente chiave dell'attuale progetto di studio. Il team ha sviluppato un prototipo in scala 1 m x 1 m di un frammento con modelli che avrebbero consentito loro di creare aree sicure e stabili in modo efficace. Alcune di queste aree sono state progettate pensando all'abitazione, comprese aree vegetali staccabili che potrebbero ospitare piante coltivate in idroponica.
Tonnellate e tonnellate di regolite dovrebbero essere rimosse da qualsiasi sito di scavo su scala reale. Quella regolite viene utilizzata come materiale per stampare in 3D un habitat stabile. Originariamente, il team stava progettando di combinare la regolite con lo zolfo liquido per produrre calcestruzzo. Ma dopo aver coinvolto scienziati dei materiali e un partner industriale specializzato nella stampa robotica con cemento, hanno deciso di utilizzare calcestruzzo a base di cemento attingendo ad alcune delle risorse idriche di Marte. La creazione stessa del cemento richiede però un'infrastruttura, quindi qualsiasi piano del genere per utilizzare la regolite dovrebbe aspettare fino a quando quell'infrastruttura non fosse già in atto sul pianeta.
Anche la strutturazione dell'habitat stesso è una considerazione chiave quando si progetta quale forma dovrebbe essere stampata in 3D. Il team si è concentrato su strutture relativamente porose, che ha permesso loro di utilizzare meno materiale nella sua costruzione. Però, le strutture avevano ancora una resistenza e una durata notevolmente elevate e fornivano anche un buon isolamento dalle radiazioni e dagli impatti di micrometeoriti che la colonia del sottosuolo sta cercando di evitare.
Alcuni dei vantaggi di questo approccio sono dovuti a uno dei maggiori driver di innovazione:la collaborazione. Il progetto è coordinato dal laboratorio RB ma coinvolge partner sia di TUD che partner commerciali esterni. Questi collaboratori portano civili, aerospaziale, e competenze di ingegneria robotica, e tecnologie di produzione additiva per lo sviluppo dell'approccio di costruzione dello sciame robotico.