Recentemente Intuitive Machines ha fatto un importante passo avanti, diventando con successo la prima entità non governativa ad atterrare sulla Luna a febbraio. Almeno l'atterraggio ebbe parzialmente successo:il lander Odysseus della compagnia finì su un fianco, sebbene i suoi strumenti e i collegamenti di comunicazione rimasero almeno parzialmente funzionanti. Quella missione, denominata IM-1, è stata la prima di una serie di ambiziose missioni pianificate dall'azienda. E recentemente hanno pubblicato un documento alla conferenza LPSC 2024 che descrive in dettaglio le caratteristiche di un robot saltellante unico che farà un passaggio nella sua prossima missione sulla luna.
Conosciuto come South Pole Hopper (o S.P. Hopper), il robot sarà il primo di una nuova classe chiamata µNova. Con un peso di soli 35 kg e un'altezza di soli 70 cm, questo velivolo miniaturizzato è un veicolo spaziale autonomo che può operare in modo completamente autonomo. Deve farlo per completare la sua missione di esplorazione della regione attorno alle regioni permanentemente in ombra (PSR) al polo sud lunare.
Nello specifico, l'imbarcazione ha quattro obiettivi distinti:
Nessuno di questi obiettivi richiede individualmente la caratteristica più notevole di S.P. Hopper, ma sicuramente sarebbe utile completarli:può "saltare" spingendosi fuori dalla superficie lunare e atterrando in un'area che sceglie in modo completamente autonomo, anche in un PSR. Può farlo con un angolo fino a 10 gradi, l'azienda si affretta a sottolineare, date le sue recenti difficoltà con l'angolazione dei veicoli spaziali.
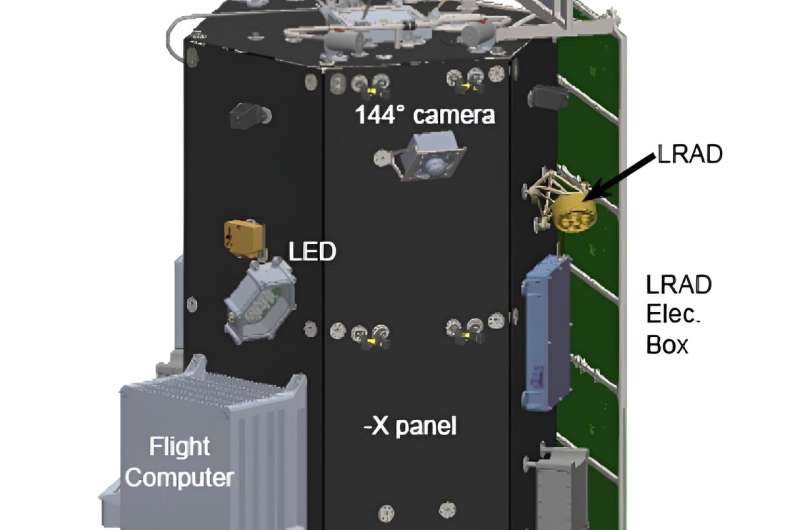
Il documento descrive diverse caratteristiche tecniche dell'hopper, incluso il fatto che utilizzerà un sistema LTE wireless per comunicare. Per raccogliere i dati necessari alla sua missione, dispone di tre strumenti scientifici principali:un set di telecamere CMOS, il cui compito principale è quello di aiutare nella navigazione autonoma ma può anche inviare immagini sulla Terra per essere analizzate; il sistema di sensori a termopila LRAD; progettato per acquisire misurazioni della luminosità della regolite e il PLWS, uno spettrometro di neutroni in miniatura, progettato specificamente per cercare l'idrogeno nello spazio.
Tuttavia, forse la parte più interessante del documento descrive in dettaglio il piano di volo. S. P. Hopper è progettato per compiere 5, forse 6, salti quando atterra al polo sud lunare. Il primo sarà un "salto di messa in servizio" che percorrerà solo 20 metri circa. Successivamente ci sarà un salto di "prova di concetto" di 100 m che dimostrerà che un robot saltellante è un mezzo di trasporto praticabile sulla luna.
Dopo questi voli iniziali, S. P. Hopper volerà per circa 300 metri fino al bordo del cratere Marston, parte della cresta Shackleton-de Gerlache. Quindi volerà nel cratere stesso, che è un PSR, e poi volerà di nuovo verso la cresta. Se c'è abbastanza carburante rimasto, Intuitive Machines pianifica un sesto volo esplorativo per osservare qualcosa di interessante nelle vicinanze.
Attualmente, il lancio dell'IM-2, il volo che porterà S.P. Hopper al Polo Sud, è previsto quest'anno. Dato il relativo successo di Intuitive Machine con il lander Odysseus, c'è molto ottimismo anche sul successo di questa missione. Per ora, però, dovremo aspettare e vedere se l'azienda riuscirà a portare a termine una missione successiva ancora più efficace.
Ulteriori informazioni: Documento:www.hou.usra.edu/meetings/lpsc2024/pdf/1162.pdf
Fornito da Universe Today