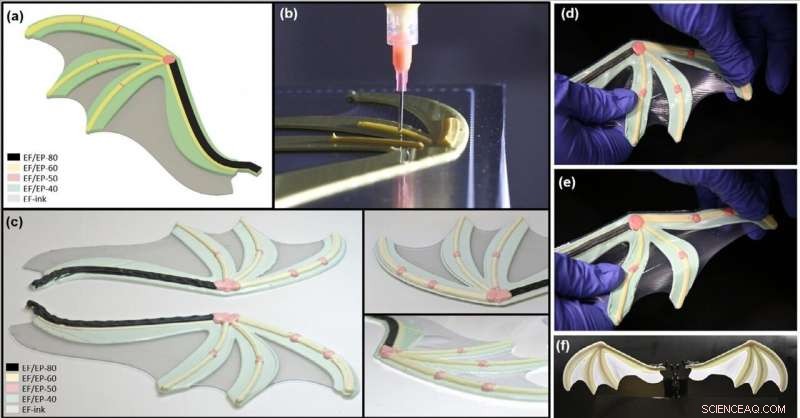
(a) Illustrazione del progetto strutturale. (b) Scrittura a inchiostro diretto della struttura ibrida. (c) Struttura indurita (area di ~90 cm 2 per ala, spessore della membrana ~0,7 mm, spessore totale del braccio ~3,5 mm). (d) Flessibilità e coesione della struttura alare sotto piccole sollecitazioni. (e) Flessibilità e coesione della struttura alare sotto grandi sollecitazioni. (f) Ali montate sul meccanismo di azionamento. Attestazione:SUTD
In uno studio pubblicato su Materiali applicati oggi , ricercatori di Singapore hanno sviluppato la più ampia gamma di resine ibride siliconiche ed epossidiche per la stampa 3D di dispositivi indossabili, apparecchiature biomediche, e robotica morbida. La gamma di materiali sintonizzabili funzionalmente graduati, che mostrava oltre cinque ordini di grandezza di modulo elastico, dimostrato un'eccellente tenacità interfacciale, maggiore precisione in strutture complesse e migliore controllo di fabbricazione per l'integrazione di componenti meccatronici.
Il team multidisciplinare della Singapore University of Technology and Design (SUTD) ha evidenziato la questione sul potenziale della robotica morbida essendo limitato nella sua robustezza e applicabilità nel loro documento, "Resine ibride siliconiche/epossidiche con proprietà meccaniche e di interfaccia regolabili per la produzione additiva di robot morbidi".
Ad esempio, l'integrazione di componenti meccatronici come i circuiti stampati (PCB), sensori, batterie, raccordi pneumatici, cavi e pompe, in corpi morbidi e compositi continuano ad essere una sfida, mentre la complessità del design e il controllo della fabbricazione sono ostacolati dai tradizionali approcci di stampaggio e fusione utilizzati per l'integrazione.
Per affrontare queste limitazioni, il team ha sviluppato una nuova gamma di ibridi polimerici che possono presentare un'ampia gamma di caratteristiche meccaniche, da molto morbide a molto rigide, per l'uso rispettivamente nella robotica morbida e nell'assemblaggio più semplice nei componenti tradizionali di meccatronica rigida. Gli ibridi polimerici mostrano un'eccellente tenacità e compatibilità chimica per resistere a grandi sollecitazioni, ed essere elaborabile tramite scrittura a inchiostro diretto per consentire la produzione digitale avanzata di strutture complesse.
La gamma di nuovi ibridi silicone-epossidici era costituita da elastomeri morbidi catalizzati da platino e resine epossidiche dure polimerizzate con indurenti a base di anidride acida. La scelta delle anidridi acide al posto degli indurenti a base di ammine comunemente utilizzati ha consentito una compatibilità chimica senza precedenti tra le fasi siliconiche ed epossidiche, e ha anche consentito la messa a punto precisa delle caratteristiche meccaniche e di interfaccia variando le sue composizioni.
La famiglia di ibridi risultante mostrava oltre cinque ordini di grandezza di modulo elastico, che vanno da 22 kPa a 1,7 GPa, che è probabilmente la gamma più ampia riportata per i materiali sintonizzabili funzionalmente graduati. I compositi con composizione stretta mostrano un'eccellente tenacità interfacciale da 0,8 a 3,0 kJ m -2 , consentendo interfacce robuste tra corpi morbidi e un'ampia gamma di componenti meccatronici tradizionali. L'aggiunta di modificatori reologici, in questo caso, laponite nanoclay:le formulazioni di inchiostro hanno consentito la produzione additiva di complesse strutture composite tridimensionali (fare riferimento a immagini e video).
I vantaggi di questa nuova famiglia di ibridi sono stati dimostrati attraverso quattro esempi principali. Primo, un PCB è stato integrato in una membrana morbida che poteva essere allungata di oltre il 200% senza mostrare alcun danno interfacciale. Secondo, un'articolazione del dito è stata riprodotta con successo da modelli anatomici, con robusta integrazione di ossa simili, simile a un tendine, e strutture legamentose. Quindi, è stata dettagliata la struttura e le prestazioni di attuatori pneumatici rinforzati con deformazioni assiali regolabili. Finalmente, è stata segnalata una struttura alare ispirata ai pipistrelli in grado di supportare dinamiche veloci e grandi deformazioni di flessione.
Le prestazioni in questi esempi possono essere raggiunte solo grazie all'approccio di fabbricazione avanzato che ha consentito la robusta combinazione di materiali su più scale e risoluzioni elevate che i tradizionali approcci di fusione o stampaggio non potevano raggiungere.
"I risultati e la comprensione derivata da questo lavoro, all'interfaccia della chimica, fisica, e ingegneria, rappresentano un contributo sostanziale all'ingegneria dei materiali soprattutto quando applicati alla robotica morbida. I nostri approcci di fabbricazione avanzati facilitano combinazioni di materiali robuste su più scale e risoluzioni elevate, consentendo nuove applicazioni in un'ampia gamma di settori chiave, come gli indossabili, assistenza sanitaria, e più specificamente robotica morbida, ", ha affermato il professore assistente ricercatore principale Pablo Valdivia y Alvarado del programma di sviluppo dei prodotti ingegneristici di SUTD.