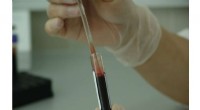
I ricercatori hanno ora descritto una nuova legge della fisica che tiene conto dell'attrito della lubrificazione elastoidrodinamica (EHL), che dovrebbe far progredire un'ampia gamma di tecnologie robotiche. L'attrito EHL si verifica quando due superfici solide entrano in contatto con un sottile strato di fluido tra di loro. Attestazione:Lilian Hsiao
Sebbene i dispositivi robotici siano utilizzati in tutto, dalle catene di montaggio alla medicina, gli ingegneri hanno difficoltà a spiegare l'attrito che si verifica quando quei robot afferrano oggetti, in particolare in ambienti umidi. I ricercatori hanno ora scoperto una nuova legge della fisica che spiega questo tipo di attrito, che dovrebbe far progredire un'ampia gamma di tecnologie robotiche.
"Il nostro lavoro qui apre le porte alla creazione di dispositivi tattili e robotici più affidabili e funzionali in applicazioni come la telechirurgia e la produzione, "dice Lilian Hsiao, un assistente professore di ingegneria chimica e biomolecolare presso la North Carolina State University e corrispondente autore di un articolo sul lavoro.
In questione c'è qualcosa chiamato attrito della lubrificazione elastoidrodinamica (EHL), che è l'attrito che si verifica quando due superfici solide entrano in contatto con un sottile strato di fluido tra di loro. Ciò include l'attrito che si verifica quando si sfregano le punte delle dita insieme, con il fluido che è il sottile strato di olio naturale sulla pelle. Ma potrebbe valere anche per un artiglio robotico che solleva un oggetto che è stato ricoperto di olio, o a un dispositivo chirurgico che viene utilizzato all'interno del corpo umano.
Uno dei motivi per cui l'attrito è importante è perché ci aiuta a tenere le cose senza farle cadere.
"Capire l'attrito è intuitivo per gli umani, anche quando maneggiamo piatti insaponati, " dice Hsiao. "Ma è estremamente difficile spiegare l'attrito EHL quando si sviluppano materiali che controllano le capacità di presa nei robot".
Per sviluppare materiali che aiutano a controllare l'attrito EHL, gli ingegneri avrebbero bisogno di una struttura che possa essere applicata uniformemente a un'ampia varietà di modelli, materiali e condizioni operative dinamiche. Ed è esattamente ciò che hanno scoperto i ricercatori.
"Questa legge può essere utilizzata per spiegare l'attrito EHL, e può essere applicato a molti diversi sistemi morbidi, purché le superfici degli oggetti siano modellate, " dice Hsiao.
In tale contesto, i modelli di superficie potrebbero essere qualsiasi cosa, dalle superfici leggermente rialzate sulla punta delle dita alle scanalature nella superficie di uno strumento robotico.
Il nuovo principio fisico, sviluppato congiuntamente da Hsiao e dal suo studente laureato Yunhu Peng, utilizza quattro equazioni per tenere conto di tutte le forze fisiche in gioco nella comprensione dell'attrito EHL. Nella carta, il team di ricerca ha dimostrato la legge in tre sistemi:dita umane; un polpastrello robotico di ispirazione biologica; e uno strumento chiamato tribo-reometro, che viene utilizzato per misurare le forze di attrito. Peng è il primo autore dell'articolo.
"Questi risultati sono molto utili nelle mani robotiche che hanno controlli più sfumati per gestire in modo affidabile i processi di produzione, " dice Hsiao. "E ha ovvie applicazioni nel regno della telechirurgia, in cui i chirurghi controllano a distanza dispositivi robotici per eseguire procedure chirurgiche. Lo consideriamo un progresso fondamentale per la comprensione del tocco e per il controllo del tocco nei sistemi sintetici".
La carta, "Attrito elastoidrodinamico di dita robotiche e umane su substrati morbidi micromodellati, " è pubblicato in Materiali della natura .