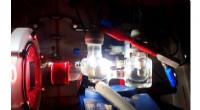
I ricercatori dell'Università Ben-Gurion del Negev hanno progettato il Rising Sprawl-Tuned Autonomous Robot (RSTAR) per funzionare in modo semplice e affidabile, cambiare forma e superare gli ostacoli comuni senza alcun intervento meccanico esterno. RSTAR utilizza gambe tentacolari regolabili inclinate verso il basso e verso l'esterno rispetto al corpo per strisciare, strisciare e arrampicarsi su e attraverso una varietà di ostacoli e superfici. Credito:Ben-Gurion U
Un nuovo robot di ricerca e soccorso altamente manovrabile che può strisciare, strisciare e arrampicarsi su terreni accidentati e attraverso spazi ristretti è stato sviluppato dai ricercatori dell'Università Ben-Gurion del Negev (BGU).
Il nuovo Rising Sprawl-Tuned Autonomous Robot (RSTAR) utilizza gambe di ruote tentacolari regolabili attaccate a un corpo che può muoversi indipendentemente e riposizionarsi per correre su superfici piane, scavalcare grandi ostacoli e su muri ravvicinati, e strisciare attraverso un tunnel, tubo o spazi stretti.
L'innovativo robot BGU è stato presentato alla International Conference on Robotics and Automation (ICRA 2018) a Brisbane, Australia, 21-25 maggio.
"RSTAR è ideale per operazioni di ricerca e soccorso in ambienti non strutturati, come edifici crollati o aree allagate, dove deve adattarsi e superare una serie di ostacoli successivi per raggiungere il suo obiettivo, "dice il dottor David Zarrouk, docente presso il Dipartimento di Ingegneria Meccanica della BGU, e capo del laboratorio di robotica bio-ispirata e medica. "È il nuovo membro della nostra famiglia di robot STAR."
Il dottor Zarrouk e lo studente della BGU e operatore di laboratorio di robotica Liran Yehezkel hanno progettato RSTAR per funzionare in modo semplice e affidabile, cambiare forma e superare gli ostacoli comuni senza alcun intervento meccanico esterno. La sua velocità e il consumo energetico relativamente basso rendono il robot ideale per un'ampia gamma di applicazioni che possono richiedere tempi di lavoro più lunghi.
Il robot utilizza le sue ruote rotonde per viaggiare a più di un metro al secondo su superfici piane dure e passa alle ruote a raggi per attraversare superfici estremamente morbide o granulari, come fango denso o sabbia, senza bloccarsi. Si arrampica anche verticalmente e striscia orizzontalmente premendo le ruote contro le pareti senza toccare il pavimento.
Il team BGU sta lavorando su una versione di robot STAR più grande che scavalcherà ostacoli più grandi, comprese le scale, e trasportare più di quattro libbre di sensori e forniture. Una STAR o RSTAR più piccola si sposterà sulle spalle del robot più grande da utilizzare in aree difficili da raggiungere e si insinuerà tra strette fessure e passaggi.