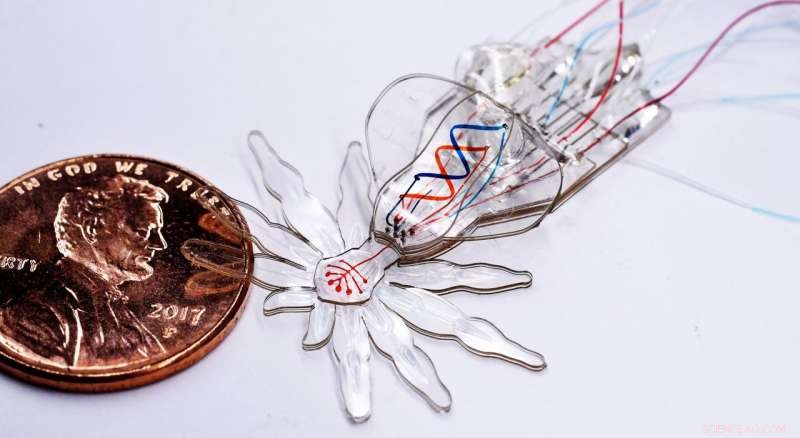
Un nuovo processo di fabbricazione consente la creazione di robot morbidi su scala millimetrica con caratteristiche su scala micrometrica, come mostrato qui con l'esempio di un piccolo ragno pavone robotico morbido con parti del corpo in movimento e occhi e addome colorati. Credito:Wyss Institute presso l'Università di Harvard
I robotisti stanno immaginando un futuro in cui morbido, i robot ispirati agli animali possono essere impiegati in sicurezza in ambienti di difficile accesso, come all'interno del corpo umano o in spazi troppo pericolosi per il lavoro dell'uomo, in cui attualmente non è possibile utilizzare robot rigidi. Sono stati creati robot morbidi di dimensioni centimetriche, ma finora non è stato possibile fabbricare robot flessibili multifunzionali in grado di muoversi e operare su scale di dimensioni inferiori.
Un team di ricercatori del Wyss Institute for Biologically Inspired Engineering di Harvard, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), e la Boston University ha ora superato questa sfida sviluppando un processo di fabbricazione integrato che consente la progettazione di robot morbidi su scala millimetrica con caratteristiche di scala micrometrica. Per dimostrare le capacità della loro nuova tecnologia, hanno creato un morbido ragno robotico - ispirato al colorato ragno pavone australiano di dimensioni millimetriche - da un unico materiale elastico con modellatura del corpo, movimento, e caratteristiche di colore. Lo studio è pubblicato su Materiale avanzato .
"I più piccoli sistemi robotici morbidi tendono ancora ad essere molto semplici, di solito con un solo grado di libertà, il che significa che possono attuare solo un particolare cambiamento di forma o tipo di movimento, " ha detto Sheila Russo, dottorato di ricerca, coautore dello studio. Russo ha contribuito ad avviare il progetto come Postdoctoral Fellow nel gruppo di Robert Wood presso il Wyss Institute e SEAS e ora è Assistant Professor presso la Boston University. "Sviluppando una nuova tecnologia ibrida che unisce tre diverse tecniche di fabbricazione, abbiamo creato un morbido ragno robotico fatto solo di gomma siliconica con 18 gradi di libertà, che comprende cambiamenti nella struttura, movimento, e colore, e con caratteristiche minuscole nella gamma dei micrometri."
Legna, dottorato di ricerca, è un membro della facoltà principale e co-leader della piattaforma Bioinspired Soft Robotics presso il Wyss Institute e il Charles River Professor of Engineering and Applied Sciences presso SEAS. "Nel regno dei dispositivi robotici morbidi, questo nuovo approccio di fabbricazione può aprire la strada al raggiungimento di livelli di complessità e funzionalità simili a quelli esibiti dalle loro controparti rigide su questa piccola scala. Nel futuro, può anche aiutarci a emulare e comprendere le relazioni struttura-funzione nei piccoli animali molto meglio di quanto possano fare i robot rigidi, " Egli ha detto.
Nei loro Origami microfluidici per dispositivi pneumatici/idraulici riconfigurabili (MORPH), il team ha prima utilizzato una tecnica di litografia morbida per generare 12 strati di silicone elastico che insieme costituiscono la base materiale del ragno morbido. Ogni strato viene ritagliato con precisione da uno stampo con una tecnica di microlavorazione laser, e poi incollato a quello sottostante per creare la ruvida struttura 3-D del morbido ragno.
La chiave per trasformare questa struttura intermedia nel progetto finale è una rete preconcetta di canali microfluidici cavi integrati nei singoli strati. Con una terza tecnica nota come auto-piegamento indotto da iniezione, pressurizzato un set di questi canali microfluidici integrati con una resina polimerizzabile dall'esterno. Questo induce i singoli strati, e con loro anche i loro strati vicini, piegarsi localmente nella loro configurazione finale, che si fissa nello spazio quando la resina si indurisce. Per di qua, Per esempio, l'addome gonfio del ragno molle e le gambe ricurve verso il basso diventano caratteristiche permanenti.
"Possiamo controllare con precisione questo processo di piegatura simile a un origami variando lo spessore e la consistenza relativa del materiale siliconico adiacente ai canali attraverso diversi strati o mediante taglio laser a diverse distanze dai canali. Durante la pressurizzazione, i canali funzionano quindi come attuatori che inducono un cambiamento strutturale permanente, " ha detto il primo e corrispondente autore Tommaso Ranzani, dottorato di ricerca, che ha iniziato lo studio come Postdoctoral Fellow nel gruppo di Wood e ora è anche Assistant Professor presso la Boston University.
Il restante set di canali microfluidici integrati è stato utilizzato come attuatori aggiuntivi per colorare gli occhi e simulare i modelli di colore addominale delle specie di ragno pavone facendo scorrere fluidi colorati; e per indurre movimenti simili a quelli della deambulazione nelle strutture delle gambe. "Questo primo sistema MORPH è stato fabbricato in un unico, processo monolitico che può essere eseguito in pochi giorni e facilmente iterabile negli sforzi di ottimizzazione del design, ", ha detto Ranzani.
"L'approccio MORPH potrebbe aprire il campo della robotica morbida ai ricercatori più concentrati sulle applicazioni mediche in cui le dimensioni e la flessibilità più piccole di questi robot potrebbero consentire un approccio completamente nuovo all'endoscopia e alla microchirurgia, ", ha affermato il direttore fondatore del Wyss Institute, Donald Ingber, M.D., dottorato di ricerca














