Credito:Petit et al.
I ricercatori dell'Ecole Centrale de Lyon hanno recentemente ideato un nuovo quadro di sviluppo ispirato alla memoria a lungo termine e ai meccanismi di ragionamento degli umani. Questo quadro, delineato in un documento presentato all'IEEE ICDL-Epirob di Tokyo e pre-pubblicato su arXiv, consente ai robot di ottimizzare autonomamente gli iperparametri sintonizzati da qualsiasi modulo di azione e/o visione, che sono trattati come una scatola nera.
Negli ultimi anni, i ricercatori hanno costruito robot in grado di completare una varietà di compiti. Ciò nonostante, l'ambiente in cui operano questi robot è spesso alquanto limitato. Questo perché nella robotica, la maggior parte degli algoritmi sono realizzati e ottimizzati manualmente da esperti umani per anticipare le potenziali sfide che il robot potrebbe incontrare in una determinata situazione.
"Però, quando si affrontano le incertezze, ad esempio, quando il robot dovrà affrontare frequentemente nuovi oggetti durante la sua vita, affidarsi sempre a programmi aggiuntivi e ottimizzazioni da parte di ingegneri umani non è praticabile:il robot deve imparare da solo, "Dottor Maxime Petit, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Vogliamo fornire ai robot meccanismi di apprendimento in modo che siano autonomi e si adattino a varie situazioni, anche quando questi non sono previsti".
Lo sviluppo di robot che si adattano automaticamente a diverse situazioni potrebbe avere una serie di applicazioni utili, ad esempio, nell'ambito della robotica industriale, dove i bracci robotici devono raccogliere oggetti sconosciuti da masse omogenee.
Credito:Petit et al.
"Volevamo che il robot ottimizzasse autonomamente i parametri di un software di presa basato sulla visione (Kamido di Siléane) per ogni oggetto in meno di poche ore, " Petit ha spiegato. "Per farlo, abbiamo utilizzato una struttura di sviluppo che mira a replicare il modo in cui i bambini imparano a conoscere il mondo. In particolare, vogliamo sfruttare la somiglianza tra gli oggetti per accelerare il processo di apprendimento trasferendo la conoscenza di un compito a un altro simile."
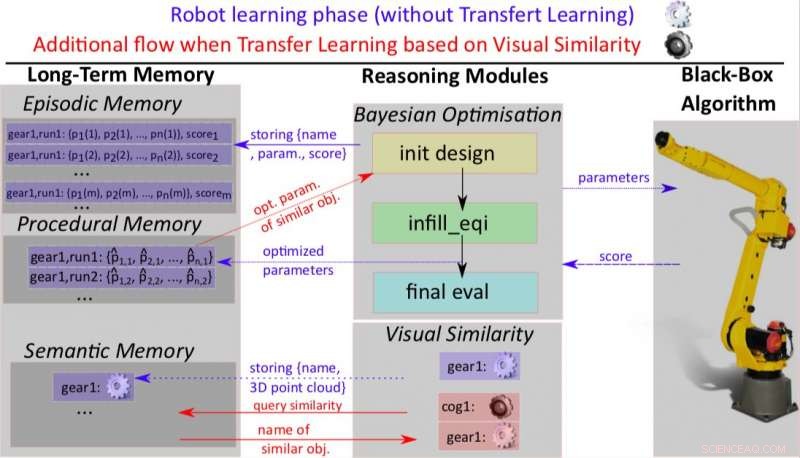
Il quadro di sviluppo presentato da Petit e dai suoi colleghi mira a consentire l'apprendimento permanente e aperto di nuove abilità nei robot attraverso un processo simile a quello osservato nei bambini umani. Per raggiungere questo obiettivo, la loro struttura include una memoria a lungo termine in cui i robot memorizzano le loro esperienze, nonché capacità di ragionamento che consentono loro di identificare elementi utili nei dati memorizzati.
"Il metodo di ottimizzazione bayesiana funziona come una strategia intelligente per tentativi ed errori:il robot stima quale insieme di parametri è meglio valutare in base ai risultati della valutazione precedente, " spiegò Petit. "In breve, questo metodo guida efficacemente il robot nell'esplorazione dei parametri intorno a valori che non sono stati provati, ma anche verso valori ad alto potenziale”.
Nonostante l'efficacia di questa tecnica, i ricercatori volevano aumentare la convergenza dell'apprendimento del robot per ottenere una migliore ottimizzazione. I metodi tradizionali di ottimizzazione bayesiana non erano quindi desiderabili, come con questi, l'apprendimento del robot parte da zero per ogni nuovo oggetto che incontra. Per ovviare a questa limitazione, i ricercatori hanno impiegato una strategia basata sulla somiglianza della visione.
Credito:Petit et al.
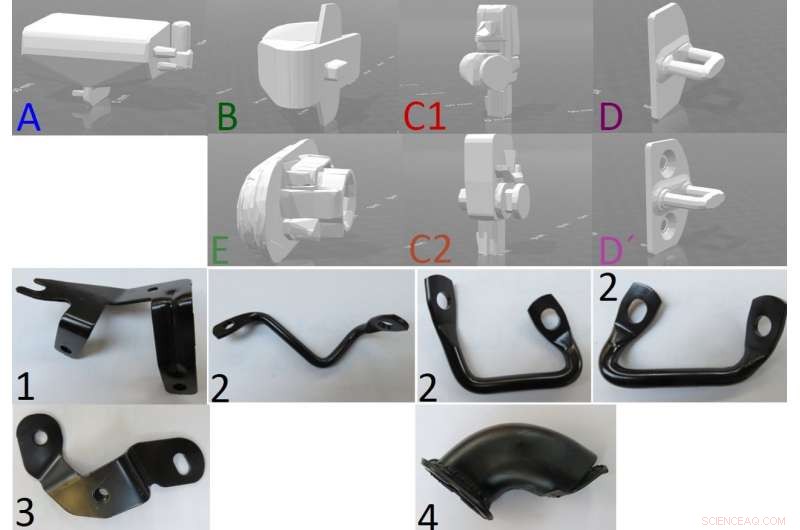
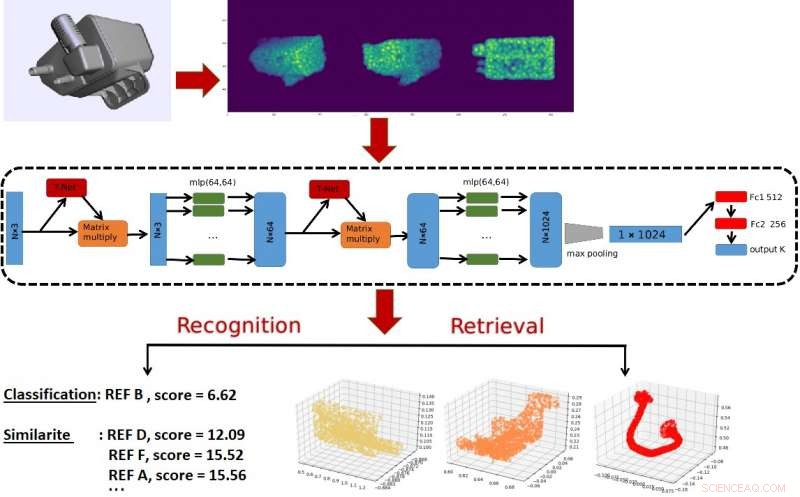
"Volevamo sfruttare la precedente esperienza del robot per compiti diversi ma simili, " disse Petit. "Così, di fronte a un nuovo oggetto, forziamo il robot a esplorare inizialmente soluzioni ottimizzate per oggetti simili. Per esempio, se il robot sa afferrare un'arancia e ora deve afferrare una mela, costringiamo il robot ad afferrare la mela usando la strategia "afferra l'arancia". Lo facciamo chiedendo al modulo di somiglianza visiva quali oggetti sono simili a quelli nuovi, ed estrarre le migliori soluzioni per questi oggetti simili dalla memoria a lungo termine."
I ricercatori hanno valutato la loro struttura all'interno di un ambiente di simulazione. Hanno scoperto che la strategia di apprendimento del trasferimento basata sulla somiglianza visiva è molto più vantaggiosa dell'apprendimento amnesico, in cui i robot imparano strategie da zero ogni volta che eseguono un nuovo compito.
Finora, i quadri di sviluppo sono stati principalmente studiati nel contesto della robotica sociale, ad esempio, aiutando a personalizzare l'assistenza dei robot sociali in base alle esigenze o alle preferenze dei loro utenti.
"L'utilizzo di questo framework in una configurazione di robotica industriale ha portato a risultati convincenti, implicando che i campi della robotica sociale e industriale hanno molto da imparare gli uni dagli altri, " ha detto Petit. "Un altro aspetto interessante del nostro studio è che il framework sta ottimizzando un algoritmo "black-box", il che significa che non sappiamo nulla di come funziona. Forniamo parametri ad esso, e in cambio, riceviamo un punteggio per la loro qualità. Ciò significa che potrebbe essere applicato anche a diverse app e algoritmi (anche al di fuori del campo della robotica) che necessitano di frequenti messe a punto."

Robot Kamido di Siléane
I ricercatori stanno ora esplorando i modi in cui i robot potrebbero trasferire le conoscenze sugli oggetti acquisiti durante le simulazioni a compiti reali che coinvolgono gli stessi oggetti. Ciò migliorerebbe ulteriormente l'efficienza di un robot, permettendogli di imparare virtualmente cose nuove e poi applicarle nella vita reale.
"L'ottimizzazione dei parametri per gli oggetti che condividono proprietà fisiche potrebbe anche portare all'emergere di tale concetto per robot specifici, " aggiunse Petit. "Per esempio, un robot potrebbe imparare che un 'appartamento, ' 'pesante, ' 'lungo, ' ecc. L'oggetto deve essere afferrato con valori specifici per un sottoinsieme di parametri. Questo può essere usato per migliorare le interazioni uomo-robot e l'apprendimento usando il linguaggio naturale, ad esempio, con i lavoratori che aiutano il robot fornendo una piccola descrizione dei nuovi oggetti da manipolare."
© 2018 Tech Xplore