Aspetto HRP-5P (a sinistra) e HRP-5P che trasporta un ca. Tavola da 13 kg (a destra). Credito:Scienze e tecnologie industriali avanzate
I ricercatori hanno sviluppato un prototipo di robot umanoide, HRP-5P, destinati a svolgere autonomamente lavori pesanti o lavorare in ambienti pericolosi.
Come un 182 cm, Robot umanoide da 101 kg, HRP-5P è stato costruito sulle tecnologie della serie HRP incorporando nuove tecnologie hardware. All'interno della serie, ha capacità fisiche insuperabili. La sua intelligenza robotica comprende la misurazione ambientale e il riconoscimento di oggetti, pianificazione e controllo del movimento di tutto il corpo, descrizione del compito e gestione dell'esecuzione, e tecnologie di sistematizzazione altamente affidabili. L'alloggiamento dell'intelligenza in questo corpo ha consentito l'installazione autonoma del cartongesso da parte del robot, che è un tipico esempio di lavoro pesante nei cantieri. L'uso di HRP-5P, come piattaforma di sviluppo, in collaborazione tra industria e mondo accademico, promette di accelerare la ricerca e lo sviluppo verso l'applicazione pratica di robot umanoidi nei cantieri edili e nell'assemblaggio di grandi strutture come aerei e navi.
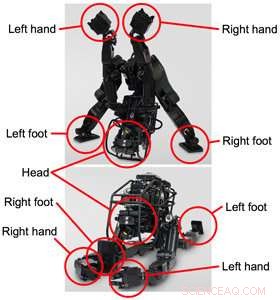
Figura 1. Piegati in avanti (in alto) e con le gambe divaricate in avanti e indietro (in basso). Credito:Scienze e tecnologie industriali avanzate
Si prevede che il calo della natalità in Giappone causerà gravi carenze di manodopera nell'edilizia e in molti altri settori. È imperativo risolvere questo problema utilizzando tecnologie robotiche. Queste tecnologie forniscono anche un'alternativa convincente all'avere lavoratori edili nei cantieri, strutture aeronautiche, o i cantieri navali eseguono lavori pesanti potenzialmente pericolosi. Però, è stato difficile rendere questi cantieri di grandi dimensioni adatti ai robot, che ha scoraggiato l'introduzione dei robot. Poiché i robot umanoidi assomigliano fisicamente alle persone, possono funzionare senza richiedere modifiche ambientali, possibilmente sollevando i lavoratori dal lavoro pesante.
Nello sviluppo della serie HRP, AIST ha collaborato con diverse aziende del settore privato, tra cui Kawada Industries Inc. (ora Kawada Robotics Corp.), e ha sviluppato tecnologie di base per l'applicazione pratica. HRP-2 era in grado di camminare bipede, sdraiarsi, alzarsi, camminando su stretti sentieri, e altre azioni. HRP-3 potrebbe camminare su superfici scivolose e serrare bulloni sui ponti tramite telecomando. La ricerca sui robot umanoidi in risposta ai disastri in corso presso l'AIST dal 2011 ha portato a una versione rivista di HRP-2 con capacità fisiche migliorate (come la lunghezza degli arti, gamma di movimento, e uscita congiunta), che potrebbe camminare su un terreno accidentato, girare le valvole, ed eseguire altre attività in modo semi-autonomo sulla base della misurazione ambientale 3D. Però, le sue capacità fisiche erano ancora insufficienti per lavori pesanti come l'installazione di cartongesso, e mancava di un grado di libertà sufficiente e di una gamma mobile sufficiente di articolazioni per emulare il movimento umano in ambienti complessi. A tal fine, L'AIST ha perseguito lo sviluppo del robot umanoide, HRP-5P, con capacità fisiche che gli consentono di sostituire le persone che fanno lavori pesanti.
Per di più, HRP-5P eredita le tecnologie della serie HRP e utilizza la tecnologia brevettata di Honda Motor Co., Ltd.
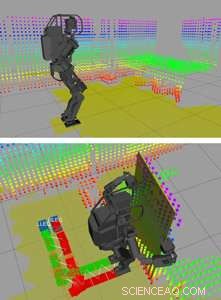
Figura 2. Mappa dell'area circostante (in alto) e piano di camminata (in basso). Credito:Scienze e tecnologie industriali avanzate
Una parte dello sviluppo di HRP-5P è stata supportata da R&D commissionato dalla New Energy and Industrial Technology Development Organization (NEDO), "R&S su sistemi robotici umanoidi altamente affidabili che possono funzionare in ambienti non strutturati" in "Robot umanoidi autonomi (campo delle tecnologie robotiche di elementi innovativi)" di "R&S su tecnologie robotiche di nuova generazione, " e sovvenzione per la ricerca scientifica dalla Japan Society for the Promotion of Science, "Pianificazione mirata del movimento di tutto il corpo basata sull'acquisizione di modelli ambientali che consente ai robot umanoidi di adattarsi ad ambienti sconosciuti" (numero del progetto di ricerca JP17H07391).
Il prototipo di robot umanoide HRP-5P è stato sviluppato con un corpo robusto e un'intelligenza avanzata per lavorare in modo autonomo e fornire una fonte alternativa di lavoro pesante.
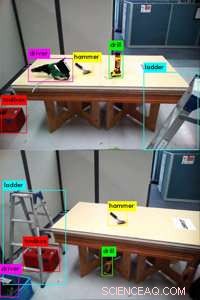
Figura 3. Esempio di rilevamento di oggetti. Credito:Scienze e tecnologie industriali avanzate
Integration of these technologies has enabled autonomous gypsum board installation in which HRP-5P handles and carries large, heavy objects at a simulated residential construction site independently.
Nello specifico, this work involves the following series of operations.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
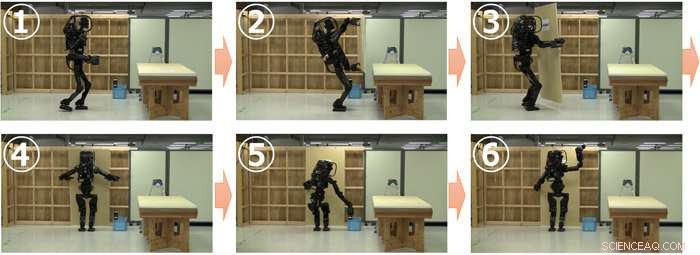
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology