Credito:Chand Gudi et al.
I ricercatori dell'Innovation and Enterprise Research Laboratory (The Magic Lab) della University of Technology di Sydney hanno proposto una nuova architettura robotica chiamata nebbia robotica (FR). Il loro approccio, delineato in un documento pre-pubblicato su arXiv, sfrutta i punti di forza del fog computing, una struttura informatica decentralizzata in cui risorse e dati sono collocati tra la loro fonte e il cloud.
Negli anni a venire, è probabile che i robot raggiungano un'adozione diffusa in una varietà di contesti, comprese le case, strutture sanitarie, e diversi settori. La comunicazione attiva è un fattore chiave per un'efficace interazione uomo-robot ei ricercatori di tutto il mondo stanno quindi cercando di ideare nuove strategie che potrebbero migliorare il modo in cui i robot comunicano.
La robotica cloud (CR) consente ai robot di eseguire calcoli estesi nel cloud condividendo mappe, immagini, dati, attività, potenza di elaborazione e altre risorse online. Però, a causa della sua vasta richiesta di dati e traffico, CR comporta seri problemi di latenza, in particolare nelle interazioni uomo-robot.
"L'idea della robotica della nebbia è venuta in mente dopo aver visto un'elevata latenza nella comunicazione di un robot, sia nelle sue risposte che nel raggiungimento del suo obiettivo, "Siva Leela Krishna Chand Gudi, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Ci siamo chiesti cosa potrebbe succedere nel prossimo futuro, quando i robot serviranno ovunque, poiché è probabile che questo ritardo aumenti. Ereditando le caratteristiche del fog computing e facendo della robotica cloud il nostro compagno, abbiamo introdotto e coniato il termine robotica della nebbia, prima alla conferenza IROS 2017."
L'obiettivo principale dello studio condotto da Gudi e dai suoi colleghi era quello di fornire risultati robusti, interazioni uomo-robot fluide ed efficienti con bassa latenza. I ricercatori volevano anche consentire ai robot di comunicare e collaborare con gli umani mentre svolgono contemporaneamente compiti, condividere i propri risultati o attività all'interno della stessa famiglia di robot. Questo alla fine trasformerebbe i robot in partner che comprendono i bisogni degli umani con cui interagiscono, rispondendo in modo rapido ed efficiente.
Credito:Chand Gudi et al.
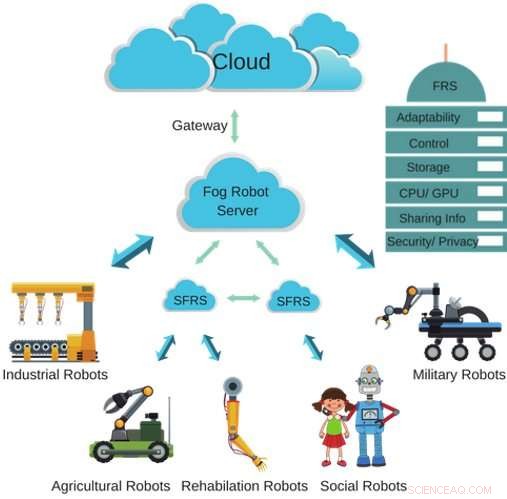
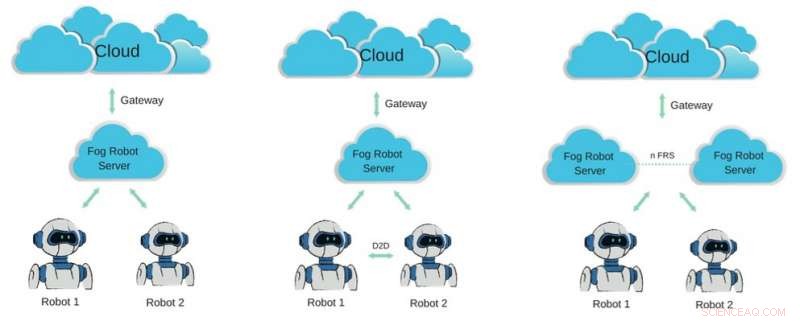
Per affrontare i problemi associati alla CR, i ricercatori hanno proposto e definito una nuova architettura robotica denominata robotica della nebbia (FR), composto da deposito, funzioni di rete, e l'informatica decentralizzata più vicina ai robot. FR ha tre componenti principali:il server robot sub-nebbia, il server del robot della nebbia, e la nuvola.
Un robot invia una richiesta di informazioni al sistema FR, inizialmente richiedendo le consegne al server del robot sub-nebbia. Se questo server può affrontare efficacemente la richiesta, passa le informazioni richieste al robot; se non può, cerca assistenza dal server del robot della nebbia. Se anche questo server non è in grado di elaborare la richiesta, chiede aiuto al cloud, che in genere risolve la richiesta e passa le informazioni al robot.
I vantaggi di questo approccio includono un tasso di risposta veloce, bassa latenza, capacità di calcolo migliorate, minor consumo di energia, hardware più economico, e meno problemi di sicurezza o privacy. In altre parole, FR potrebbe portare a interazioni uomo-robot robuste e più veloci, migliorando anche la durata della batteria del robot.
"Sulla base del ritardo medio ricevuto da un social robot pepper e da una configurazione di FRS/Cloud, abbiamo considerato un valore di latenza, " ha detto Gudi. "In seguito abbiamo esaminato le nostre attuali metodologie su una piattaforma di simulazione, valutandone i potenziali effetti all'aumentare del numero di robot. Abbiamo dimostrato che FR fornisce una bassa latenza e potrebbe svolgere un ruolo essenziale in futuro, diventando un'aggiunta a CR."
In una serie di valutazioni iniziali, FR ha ottenuto tassi di risposta molto più rapidi rispetto agli approcci CR. I ricercatori ritengono che potrebbe essere utilizzato indipendentemente o integrato con CR, riducendo il carico sul cloud e migliorando la qualità del servizio (QoS).
Credito:Chand Gudi et al.
"Noi umani cerchiamo aiuto dagli altri ogni volta che abbiamo bisogno di informazioni, ma i robot sono limitati ai compiti per cui sono pre-programmati, " ha spiegato Gudi. "FR consente anche a un robot di condividere i suoi dati con un altro robot".
Per spiegare meglio questo punto, Gudi ha offerto un esempio di come più robot potrebbero assistere gli esseri umani all'interno di un aeroporto. Nello scenario da lui descritto, un viaggiatore chiederebbe a un robot la posizione del suo gate di partenza. Il robot guidava il viaggiatore verso la scala mobile e poi affidava il compito a un secondo robot, che sarebbe stato in attesa all'altra estremità della scala mobile.
Per riconoscerlo/la mentre si avvicinano all'altra estremità della scala mobile, questo secondo robot richiederebbe informazioni sul nome della persona, identità, genere e che aspetto hanno. In questa situazione, FR consentirebbe a questi due robot di collaborare al compito e comunicare tra loro, scambiare rapidamente le informazioni necessarie per completare l'attività.
"Allo stesso modo, Le tecniche FR potrebbero essere applicate nelle università, metropolitane, robot industriali, E la lista continua, raggiungere diverse aree della robotica, " disse Gudi. "Alla fine, FR porta a una robusta interazione uomo-robot con bassa latenza, proteggendo allo stesso tempo i dati personali salvandoli all'interno del server del robot della nebbia."
I ricercatori hanno effettuato una serie di ulteriori analisi, che presto pubblicheranno online. Stanno anche pianificando di testare l'efficacia di FR alla RoboCup a Sydney, dove diversi robot si sfideranno allo stato brado.
© 2018 Science X Network