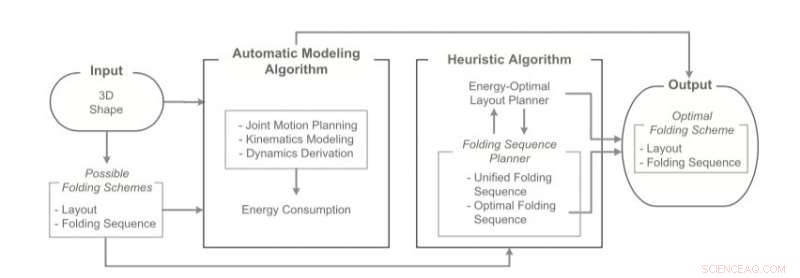
Panoramica della pianificazione della riconfigurazione energeticamente ottimale per robot modulari utilizzando due approcci, un algoritmo di modellazione automatica e un algoritmo euristico. Credito:Yao et al.
I ricercatori del Reconfigurable Robotics Lab (RRL) dell'École Polytechnique Fédèrale de Lausanne (EPFL) hanno recentemente sviluppato un nuovo approccio per la riconfigurazione dei robot modulari che si ispira all'arte dell'origami. Questo metodo, delineato in un articolo pubblicato su Sage's Rivista internazionale di ricerca sulla robotica , elimina le modifiche alla connettività durante la trasformazione di un sistema.
I robot modulari riconfigurabili sono sistemi versatili in grado di trasformare la propria forma per svolgere compiti diversi in una varietà di ambienti. Questo può essere particolarmente utile nelle impostazioni basate sulla missione, come lo spazio, riconoscimento, campionamento, o operazioni di ricerca e soccorso. In questi casi, i robot convenzionali a morfologia fissa potrebbero avere difficoltà ad adattarsi ad ambienti complessi e incerti, mentre i sistemi robotici modulari possono riconfigurarsi autonomamente e adattarsi a nuove circostanze.
La riconfigurabilità dei sistemi modulari si ottiene modificando la morfologia della loro struttura complessiva, nonché collegando e scollegando i loro moduli. Nonostante i notevoli vantaggi dell'utilizzo di questi sistemi, il gran numero di singoli componenti e gradi di libertà (DoF) coinvolti rende la modifica della loro configurazione molto impegnativa.
Per pianificare e ottimizzare questo processo, studi precedenti hanno proposto una varietà di approcci, che si possono suddividere in due grandi categorie. La prima categoria prevede la configurazione di destinazione dividendo l'architettura modulare del sistema in diversi insiemi di moduli, che può semplificare il processo di riconfigurazione. Questi approcci possono facilitare la progettazione della configurazione finale per compiti specifici, tuttavia non riescono ad affrontare il processo di riconfigurazione dinamica.
Un altro approccio per ottimizzare la riconfigurazione consiste nel ridurre al minimo il numero di modifiche alla connettività quando il sistema si sta trasformando nella forma desiderata. Sebbene questi pianificatori di riconfigurazione mirino a ridurre il numero di modifiche alla connettività, richiedono ancora una qualche forma di disconnessione e connessione tra i moduli nel processo. Questi cambiamenti di connettività richiedono molto tempo, può causare complicazioni nella trasformazione complessiva e può provocare disallineamento, portando al guasto meccanico del sistema.
Affrontare i limiti degli approcci esistenti, il team di ricercatori di RRL ha introdotto una nuova strategia per pianificare la riconfigurazione dei sistemi di robotica modulare, che attinge dal processo di piegatura dell'origami. L'origami è l'arte tradizionale giapponese di piegare fogli di carta piatti in una varietà di oggetti o forme 3D.
"Il nostro metodo consiste in un pianificatore di riconfigurazione ottimale dal punto di vista energetico che genera uno schema di assemblaggio 2D iniziale e una sequenza di attuazione delle unità modulari, entrambi con conseguente consumo energetico minimo, " hanno scritto i ricercatori nel loro articolo.
Il framework algoritmico ideato dai ricercatori comprende due componenti principali:un algoritmo di modellazione automatica e un algoritmo euristico. L'algoritmo di modellazione automatica genera il modello cinematico e la derivazione dinamica di aggregati robotici, calcolare il consumo di coppia dei modelli di pre-piegatura per sequenze di piegatura predefinite e utilizzare la pianificazione del movimento per considerare lo spessore della struttura. L'algoritmo euristico d'altra parte, include un pianificatore di layout 2D ottimale seguito da due pianificatori di sequenza di piegatura:un pianificatore di attuazione unificato per layout diversi e un pianificatore ottimale all'interno di un layout specifico.
Il nuovo approccio ideato da RRL affronta efficacemente il problema NP-completo della pianificazione della riconfigurazione energeticamente ottimale nei robot modulari, generare schemi di riconfigurazione energeticamente ottimali per l'assemblaggio iniziale e la sequenza di piegatura dei moduli del sistema. I ricercatori hanno valutato la loro strategia utilizzando simulazioni su Mori, una piattaforma robotica modulare, e ha ottenuto risultati molto promettenti.
"Dimostriamo l'efficacia del nostro metodo applicando gli algoritmi a Mori, un robot origami modulare, nella simulazione, " I ricercatori hanno scritto nel loro articolo. "I nostri risultati mostrano che l'algoritmo euristico produce schemi di riconfigurazione di alta qualità, rispetto all'algoritmo di modellazione automatica, risparmiando contemporaneamente una notevole quantità di tempo e fatica di calcolo."
© 2018 Science X Network