I ricercatori dell'Università di Washington hanno sviluppato un sistema robotico in grado di nutrire le persone che hanno bisogno di qualcuno che le aiuti a mangiare. Qui, un volontario mostra come funziona il sistema. Credito:Eric Johnson/Università di Washington
Circa 1 milione di adulti negli Stati Uniti ha bisogno di qualcuno che li aiuti a mangiare, secondo i dati del censimento del 2010. È un compito lungo e spesso scomodo, fatto in gran parte per necessità piuttosto che per scelta.
I ricercatori dell'Università di Washington stanno lavorando a un sistema robotico che può aiutare a semplificare le cose. Dopo aver identificato diversi cibi su un piatto, il robot può elaborare strategie su come utilizzare una forchetta per raccogliere e fornire il morso desiderato alla bocca di una persona.
Il team ha pubblicato i suoi risultati in una serie di articoli:uno è stato recentemente pubblicato su Lettere IEEE sulla robotica e l'automazione , mentre l'altro sarà presentato il 13 marzo alla Conferenza internazionale ACM/IEEE sull'interazione uomo-robot in Corea del Sud.
"Essere dipendenti da un caregiver per nutrire ogni boccone ogni giorno toglie il senso di indipendenza di una persona, " ha detto l'autore corrispondente Siddhartha Srinivasa, il Boeing Endowed Professor nella Paul G. Allen School of Computer Science &Engineering dell'UW. "Il nostro obiettivo con questo progetto è dare alle persone un po' più di controllo sulle loro vite".
L'idea era quella di sviluppare un sistema di alimentazione autonomo che sarebbe stato attaccato alle sedie a rotelle delle persone e dar da mangiare alle persone qualunque cosa volessero mangiare.
"Quando abbiamo iniziato il progetto ci siamo resi conto:ci sono tanti modi in cui le persone possono mangiare un pezzo di cibo a seconda delle sue dimensioni, forma o consistenza. Come iniziamo?" ha detto il co-autore Tapomayukh Bhattacharjee, un associato di ricerca post-dottorato presso la Allen School. "Così abbiamo organizzato un esperimento per vedere come gli umani mangiano cibi comuni come uva e carote".
I ricercatori hanno disposto piatti con circa una dozzina di diversi tipi di cibo, di consistenza variabile dalle carote dure alle banane morbide. I piatti includevano anche cibi come pomodori e uva, che hanno una pelle dura e interni morbidi. Quindi il team ha dato ai volontari una forchetta e ha chiesto loro di raccogliere diversi pezzi di cibo e dar loro da mangiare a un manichino. La forchetta conteneva un sensore per misurare quanta forza le persone usavano quando prendevano il cibo.
I volontari hanno utilizzato varie strategie per raccogliere cibo con diverse consistenze. Per esempio, le persone infilzavano oggetti morbidi come le banane in un angolo per evitare che scivolassero dalla forchetta. Per oggetti come carote e uva, i volontari tendevano a usare movimenti dimenanti per aumentare la forza e lanciare ogni morso.
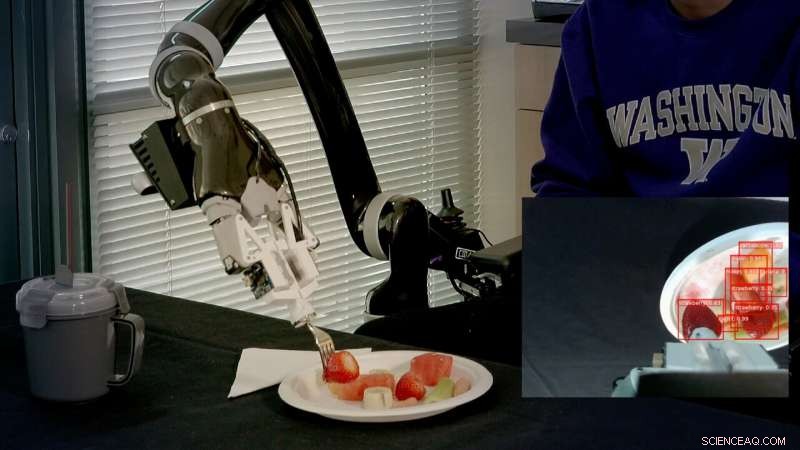
L'algoritmo di rilevamento degli oggetti, chiamato RetinaNet, scansiona la lastra, identifica i tipi di cibo su di esso e posiziona una cornice attorno a ciascun elemento. Credito:Eric Johnson/Università di Washington
"Le persone sembravano usare strategie diverse non solo in base alle dimensioni e alla forma del cibo, ma anche a quanto è duro o morbido. Ma abbiamo davvero bisogno di farlo?" ha detto Bhattacharjee. "Abbiamo deciso di fare un esperimento con il robot in cui abbiamo fatto infilzare il cibo fino a quando la forchetta ha raggiunto una certa profondità all'interno, indipendentemente dal tipo di cibo."
Il robot ha usato la stessa strategia di forza e spiedo per cercare di raccogliere tutti i pezzi di cibo, indipendentemente dalla loro consistenza. Era in grado di raccogliere cibi duri, ma ha lottato con cibi morbidi e quelli con pelli dure e interni morbidi. Quindi robot, come gli umani, devono regolare la forza e l'angolazione che usano per raccogliere diversi tipi di cibo.
Il team ha anche notato che gli atti di raccogliere un pezzo di cibo e darlo a qualcuno non sono indipendenti l'uno dall'altro. I volontari spesso orientavano specificamente un pezzo di cibo sulla forchetta in modo che potesse essere mangiato facilmente.
"Puoi prendere un bastoncino di carota infilzandolo al centro del bastoncino, ma sarà difficile per una persona mangiare, " Bhattacharjee ha detto. "D'altra parte, se la raccogli da una delle estremità e poi inclini la carota verso la bocca di qualcuno, è più facile dare un morso."
Per progettare una strategia di infilzamento e alimentazione che cambia in base al prodotto alimentare, i ricercatori hanno combinato due diversi algoritmi. Per prima cosa hanno usato un algoritmo di rilevamento degli oggetti chiamato RetinaNet, che scansiona la lastra, identifica i tipi di cibo su di esso e posiziona una cornice attorno a ciascun elemento.
Poi hanno sviluppato SPNet, un algoritmo che esamina il tipo di cibo in un frame specifico e indica al robot il modo migliore per prelevare il cibo. Per esempio, SPNet dice al robot di infilzare una fragola o una fetta di banana nel mezzo, e infilzate le carote a una delle due estremità.
Il team ha chiesto al robot di raccogliere pezzi di cibo e dar loro da mangiare ai volontari utilizzando SPNet o una strategia più uniforme:un approccio che infilzava il centro di ogni alimento indipendentemente da cosa fosse. Le diverse strategie di SPNet hanno superato o hanno avuto le stesse prestazioni dell'approccio uniforme per tutto il cibo.
"Molte sfide ingegneristiche non sono esigenti riguardo alle loro soluzioni, ma questa ricerca è molto intimamente connessa con le persone, " disse Srinivasa. "Se non teniamo conto di quanto sia facile per una persona dare un morso, quindi le persone potrebbero non essere in grado di utilizzare il nostro sistema. C'è un universo di tipi di cibo là fuori, quindi la nostra più grande sfida è sviluppare strategie in grado di affrontarle tutte".
Il team sta attualmente lavorando con il Taskar Center for Accessible Technology per ottenere feedback da operatori sanitari e pazienti nelle strutture di residenza assistita su come migliorare il sistema per soddisfare le esigenze delle persone.
"In definitiva il nostro obiettivo è che il nostro robot aiuti le persone a pranzare o cenare da sole, Srinivasa ha detto. "Ma il punto non è sostituire i caregiver:vogliamo responsabilizzarli. Con un robot per aiutare, il caregiver può preparare il piatto, e poi fai qualcos'altro mentre la persona mangia."