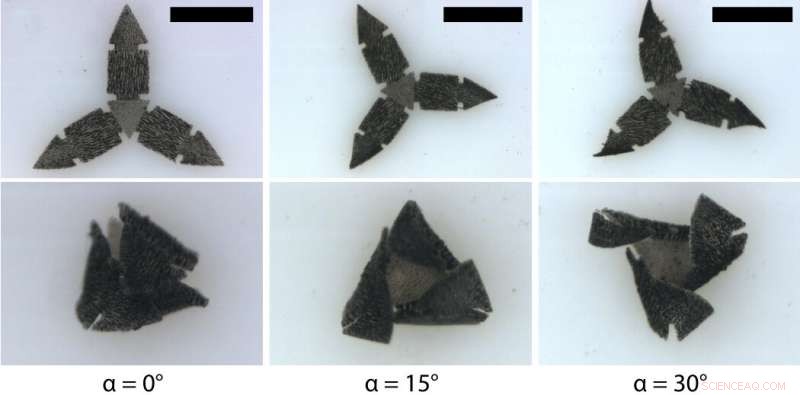
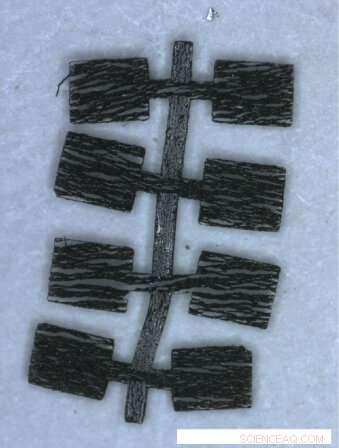
Immagini viste dall'alto delle strutture magnetiche morbide a tre bracci che portano diversi profili di magnetizzazione. Credito:Xu et al., Sci. Robot. 4, eaav4494 (2019)
Assemblare un microrobot utilizzato per richiedere un paio di pinzette ad ago, un microscopio, mani ferme e almeno otto ore. Ma ora i ricercatori dell'Università di Toronto Engineering hanno sviluppato un metodo che richiede solo una stampante 3D e 20 minuti.
Nel laboratorio del professor Eric Diller, i ricercatori creano microrobot magnetizzati, delle dimensioni della testa di uno spillo, che possono viaggiare attraverso vasi e organi pieni di liquido all'interno del corpo umano. Diller e il suo team controllano il movimento di questi microrobot in modalità wireless utilizzando campi magnetici.
Ogni microrobot è costruito disponendo con precisione sezioni microscopiche di aghi magnetici in cima a un piatto, materiale flessibile. Una volta schierato, i ricercatori applicano campi magnetici per indurre i microrobot a viaggiare con un movimento simile a un verme attraverso canali fluidi, o chiudere le sue minuscole "ganasce" meccaniche per prelevare un campione di tessuto.
"Questi robot sono piuttosto difficili da fabbricare e richiedono molta manodopera perché il processo richiede precisione, "dice studente laureato, Tianqi Xu. "Anche per la necessità del montaggio manuale, è più difficile rendere questi robot più piccoli, che è uno degli obiettivi principali della nostra ricerca".
Ecco perché Xu e i suoi compagni di laboratorio hanno sviluppato un approccio automatizzato che riduce notevolmente i tempi di progettazione e sviluppo, ed espande i tipi di microrobot che possono produrre. I loro risultati sono stati pubblicati oggi in Robotica scientifica .
Sono necessari microrobot più piccoli e complessi per future applicazioni mediche, come la somministrazione mirata di farmaci, fecondazione assistita, o biopsie.
"Se stessimo prelevando campioni nel tratto urinario o all'interno di cavità fluide del cervello, immaginiamo che una tecnica ottimizzata sarebbe strumentale nel ridimensionamento degli strumenti robotici chirurgici, "dice Diller.
Per dimostrare le capacità della loro nuova tecnica, i ricercatori hanno ideato più di 20 diverse forme robotiche, che sono stati poi programmati in una stampante 3D. La stampante quindi costruisce e solidifica il design, orientare le particelle modellate magneticamente come parte del processo.
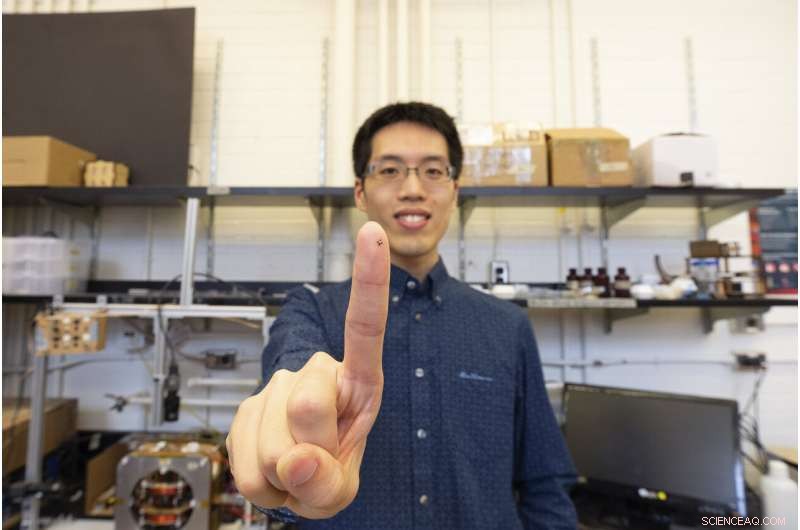
Lo studente di MASc Tianqi Xu tiene in mano un microrobot che è stato fabbricato utilizzando il loro sistema automatizzato. Credito:Liz Do, U of T Engineering
Il robot magnetico strisciante. Credito:Xu et al., Sci. Robot. 4, eaav4494 (2019)
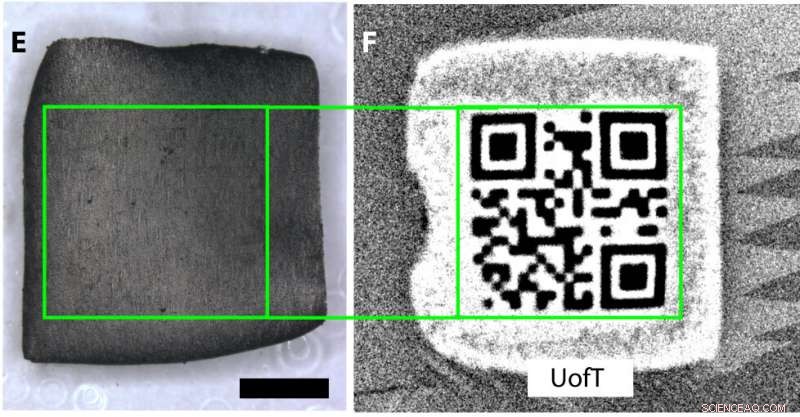
A dimostrazione di ciò, il loro metodo può essere utilizzato per magnetizzare polimeri morbidi su piccola scala, i ricercatori hanno codificato magneticamente un codice QR con confini chiaramente definiti e spigoli vivi in una regione di 5 mm × 5 mm su un foglio di polimero. Credito:Xu et al., Sci. Robot. 4, eaav4494 (2019)
"In precedenza, prepariamo una forma e la progetteremmo manualmente, passare settimane a pianificarlo, prima che potessimo fabbricarlo. E questa è solo una forma, " dice Diller. "Poi quando lo costruiamo, scopriremmo inevitabilmente stranezze specifiche, ad esempio, potremmo doverlo modificare per renderlo un po' più grande o più sottile per farlo funzionare."
"Ora possiamo programmare le forme e fare clic su stampa, " aggiunge Xu. "Possiamo iterare, progettarlo e perfezionarlo facilmente. Abbiamo il potere di esplorare davvero nuovi design ora".
L'approccio ottimizzato dei ricercatori apre le porte allo sviluppo di microrobot ancora più piccoli e complessi dell'attuale dimensione millimetrica. "Pensiamo che sia promettente che un giorno potremmo diventare 10 volte più piccoli, "dice Diller.
Il laboratorio di Diller prevede di utilizzare il processo automatizzato per esplorare forme più sofisticate e complicate di microrobot. "Come comunità di ricerca sulla robotica, c'è bisogno di esplorare questo spazio di minuscoli robot medici, " aggiunge Diller. "Essere in grado di ottimizzare i progetti è un aspetto davvero critico di ciò di cui il settore ha bisogno".