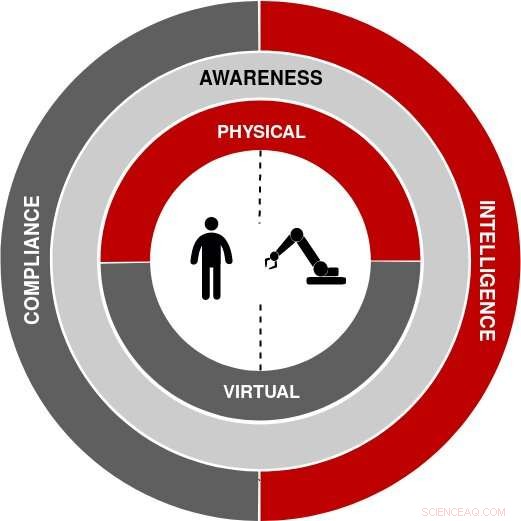
Un diagramma di sistema per il quadro concettuale per una collaborazione tra uomo e robot come sistema di sistemi che evidenzia i 3 aspetti di un sistema HRC:consapevolezza, Intelligenza e conformità. Attestazione:Sauro, Kumar &Sahin.
I ricercatori del Century Mold Collaborative Robotics Laboratory (CMCRL) del Rochester Institute of Technology (RIT) di New York hanno recentemente sviluppato un nuovo framework per monitorare le risposte fisiologiche umane mentre gli utenti collaborano con un robot per completare un'attività. Sotto la supervisione del Prof. Ferat Sahin, direttore del Laboratorio di Bio-Robotica Multiagente, I ricercatori CMCRL stanno lavorando per sviluppare sistemi, framework e strumenti software per studiare la collaborazione uomo-robot in un ambiente industriale. Il loro nuovo approccio, delineato in un documento pre-pubblicato su arXiv e pronto per essere presentato ai Sistemi IEEE, Conferenza Man &Cybernetics a Bari (Italia), consente la raccolta continua di dati fisiologici durante le interazioni uomo-robot, mentre modifica i movimenti di un robot per innescare una risposta nell'essere umano con cui sta interagendo.
Molti esperti ritengono che presto, uomini e macchine lavoreranno insieme in una varietà di campi, compresa l'industria e la produzione. Per consentire un'automazione efficiente e la collaborazione uomo-robot, però, i ricercatori dovranno sviluppare approcci che sfruttino le capacità umane come il processo decisionale, destrezza, flessibilità e creatività, combinandoli con la velocità, precisione e potenza associate ai robot.
Infatti, mentre l'automazione completa sarebbe molto costosa, la produzione eseguita manualmente da soli esseri umani è spesso lenta e soggetta a errori. È quindi importante sviluppare strumenti che migliorino la collaborazione uomo-robot. Secondo RIA, questa sarà una parte centrale della Quinta Rivoluzione Industriale, noto anche come Industria 5.0.
"Secondo noi ci sono tre sfide principali per la collaborazione uomo-robot nell'industria. Sono la sicurezza, fiducia umana nell'automazione e nella produttività, "Shitij Kumar, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Tutti questi dipendono l'uno dall'altro. Per affrontare queste sfide, abbiamo prima sviluppato una configurazione di collaborazione uomo-robot (HRC) come un sistema di sistemi che ci avrebbe permesso di creare diversi scenari di collaborazione uomo-robot e comprendere e analizzare le interazioni uomo-robot".
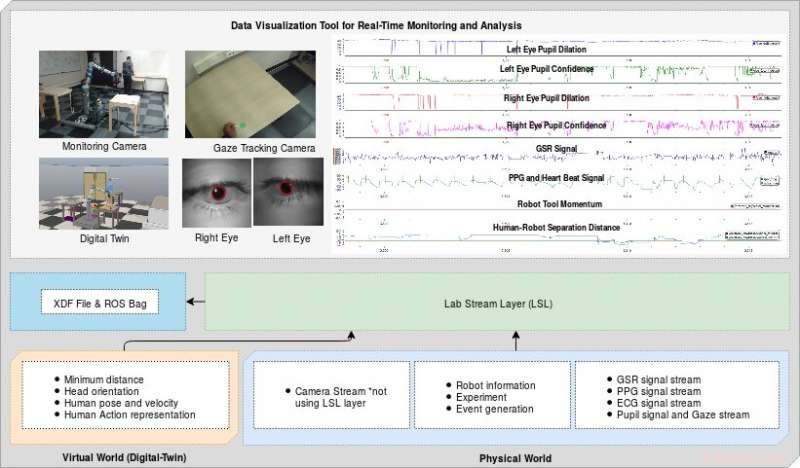
Un diagramma di sistema dell'implementazione basato sul framework proposto che rappresenta la raccolta dei dati e il monitoraggio durante un esperimento HRC. Attestazione:Sauro, Kumar &Sahin.
Come parte del suo dottorato di ricerca, sotto la guida del dottor Ferat Sahin, il direttore della CMCRL, Kumar ha iniziato a sviluppare un sistema che modifica il comportamento del robot in base alla distanza di separazione uomo-robot e alle azioni nello spazio di lavoro condiviso. In tale contesto, il comportamento di un robot è deterministico e prevedibile in base a regole.
Nonostante la promessa mostrata dal suo approccio, scoprì che il feedback umano non si verificava sempre, che ha reso più difficile per il suo sistema ottenere una conformità robot soddisfacente. La conformità del robot significa essenzialmente che il robot può gestire le aspettative degli esseri umani con cui sta interagendo e comunicare efficacemente con loro.
"Ritenevamo che una migliore conformità del sistema che offrisse all'operatore che lavora con il robot un senso di controllo e predittività del comportamento del robot avrebbe aumentato la sua 'fiducia nell'automazione, " e quindi aumentare la produttività del compito, " Kumar ha detto. "Tuttavia, abbiamo quindi iniziato a chiederci, come si quantifica la "fiducia" o il livello di comfort di un operatore umano che lavora con il robot?"
Kumar e i suoi colleghi ritengono che il monitoraggio dei segnali fisiologici umani, che sono indicatori di stress mentale e fisico, così come altre emozioni, durante un'attività che implica l'interazione uomo-robot sarebbe un passo nella giusta direzione. Questa convinzione è supportata da ricerche precedenti che hanno scoperto che tali segnali (noti come risposte psicofisiologiche) sono indicatori affidabili per modificare il comportamento e il movimento dei robot.

Sensori e dispositivi utilizzati nella realizzazione del prototipo. I ricercatori hanno utilizzato un sistema di motion capture per monitorare il movimento umano e una telecamera per registrare l'esperimento. Hanno anche monitorato lo sguardo umano utilizzando Pupil Labs e le risposte fisiologiche umane come la dilatazione della pupilla, PPG, GSR, EEG \&ECG registrato. Attestazione:Sauro, Kumar &Sahin.
Con questo in testa, Celal Saver, un dottorato di ricerca Studente presso CMCRL di RIT, ha condotto uno studio per esplorare gli effetti del movimento e del comportamento del robot sulle risposte psicofisiologiche umane. L'obiettivo principale del suo studio era capire quali cambiamenti nel movimento di un robot provocano risposte di "disagio umano" come paura o stress.
"Per fare questo, era necessaria una struttura per un sistema che rappresentasse e registrasse contemporaneamente il movimento del robot e lo stato fisiologico umano, " Ha spiegato Savur. "Una volta identificata la relazione tra il movimento del robot e lo stato fisiologico umano, la risposta fisiologica umana può essere utilizzata come feedback per controllare/aggiornare direttamente il movimento/comportamento del robot. Tali sistemi sono chiamati "sistemi di calcolo fisiologico". in cui i giochi si adattano in tempo reale alle risposte del giocatore, per ottenere un'esperienza di gioco più interattiva."
Nel loro studio, Savur e Kumar hanno deciso di sviluppare un framework in grado di monitorare le risposte psicofisiologiche umane mentre gli utenti completano attività che implicano la collaborazione uomo-robot. Il loro lavoro si colloca all'intersezione tra informatica, robotica e psicofisiologia, una branca delle neuroscienze che cerca di capire come lo stato mentale di una persona e le sue risposte fisiologiche interagiscono o si influenzano a vicenda.
Il framework che hanno sviluppato rientra nella categoria del "calcolo fisiologico". Questo è un tipo di calcolo affettivo che incorpora l'adattamento del software in tempo reale all'attività psicofisiologica dell'utente. Essenzialmente, il quadro proposto può essere utilizzato per studiare come i cambiamenti nel movimento del robot (ad esempio velocità e traiettoria) influenzano l'operatore umano in un ambiente industriale.
"Lasciaci considerare, Per esempio, che ci sono due operatori che lavorano con un robot, operatore A e B, " ha spiegato Kumar. "L'operatore A ha lavorato più a lungo ed è a suo agio nel lavorare con il robot, in quanto può prevedere il comportamento del robot dall'esperienza. L'operatore B è nuovo ed è un po' scettico sul movimento del robot. Il comportamento del robot cambia in termini di velocità con cui si muove e di quanta distanza mantiene quando è vicino all'operatore in base allo stato fisiologico e ai modelli comportamentali dell'operatore. In questo scenario, per una migliore interazione uomo-robot, il robot può muoversi a velocità più elevate lavorando vicino all'operatore A, e muoviti lentamente lavorando con l'operatore B. Man mano che l'operatore B acquisisce più esperienza, il movimento del robot può adattarsi ad esso, costruendo così fiducia e influenzando positivamente la produttività complessiva."
Lo studio condotto dai ricercatori del CMCRL aveva due obiettivi principali. Il primo è stato quello di generare un database di attività di collaborazione uomo-robot, registrazione delle interazioni uomo-robot. Hanno quindi voluto utilizzare questo database per studiare come le risposte fisiologiche umane possono essere utilizzate per influenzare il movimento di un robot, impattando positivamente sul processo di automazione. In altre parole, il loro scopo era costruire un sistema di calcolo fisiologico per la collaborazione uomo-robot in ambienti industriali e manifatturieri.
"La nostra struttura è essenzialmente un sistema che rappresenta e registra contemporaneamente il movimento del robot e lo stato fisiologico umano, " Kumar ha detto. "Per registrare queste informazioni, il framework fornisce interfacce al robot, sensori come fotocamere, motion capture e anche ai dispositivi di acquisizione dati biologici/biometrici. Poiché tutti questi dispositivi funzionano su frequenze di campionamento diverse, questo framework aiuta nell'acquisizione sincrona dei dati e nella rappresentazione della collaborazione uomo-robot."
Nei tradizionali allestimenti sperimentali di robotica sociale, ai soggetti umani vengono poste domande sulle loro esperienze e percezioni durante o dopo un esperimento. Usando il loro feedback, i ricercatori sono quindi in grado di analizzare e quantificare i dati soggettivi raccolti durante l'esperimento.
"Metodi che interrompono i soggetti o fanno ricordare al soggetto la loro esperienza, però, non sono sempre in grado di mantenere l'integrità dell'esperimento o di rappresentare accuratamente i dati soggettivi, " Kumar ha spiegato. "Pertanto, a differenza dei metodi tradizionali, questa implementazione del framework consente al soggetto umano o al ricercatore principale di generare marcatori di eventi mentre viene eseguito l'esperimento/attività di collaborazione tra robot umano (HRC)".
La loro struttura può generare automaticamente indicatori di eventi basati sulla rappresentazione uomo-robot in un mondo virtuale, che è noto come gemello digitale. Ad esempio, può aiutare a identificare quando il robot e l'essere umano erano più vicini l'uno all'altro durante l'attività, quando il robot si è dovuto fermare o è stato interrotto da un'azione umana, il progresso del compito svolto dall'essere umano, eventi basati su comandi o controllo da parte dell'operatore umano, un evento in cui il robot stava lavorando alla massima velocità, e l'inizio/fine di un compito.
"Il nostro framework fornisce anche un'interfaccia utente per i ricercatori per riprodurre e visualizzare i loro esperimenti HRC, " Kumar ha detto. "Inoltre, consente loro di analizzare ed etichettare i dati raccolti. La raccolta continua e sincrona di dati fisiologici da vari dispositivi e l'interfacciamento con il robot di controllo e interfaccia in un unico ecosistema, permette una rappresentazione completa dello stato umano e robotico. Questo può aiutare a capire la causa e l'effetto tra lo stato fisiologico umano e i movimenti del robot".
Con l'avvento dei dispositivi indossabili e dell'Internet of Things (IoT), i dati fisiologici umani diventeranno più facili da raccogliere e quindi saranno prontamente disponibili. Il framework sviluppato dalla ricerca potrebbe quindi rivelarsi estremamente prezioso, poiché è progettato per sfruttare questi dati per migliorare le interazioni uomo-robot.
"Questo framework consente una registrazione continua dei dati con generazione di eventi incorporata e sincronizzazione del segnale su sistemi distribuiti in grado di mantenere l'integrità dell'esperimento (ricreando lo scenario di un'attività in un ambiente industriale) e rappresentare accuratamente i dati soggettivi, " ha detto Kumar.
Kumar e i suoi colleghi credono che un agente capace di tale calcolo fisiologico (cioè, in grado di rilevare le risposte fisiologiche umane e rispondere a queste) potrebbe tradursi in un sistema chiuso umano-in-the-loop, dove vengono monitorati sia gli utenti umani che i robot in una configurazione HRC e le informazioni vengono condivise tra loro. Ciò potrebbe tradursi in una migliore comunicazione, che alla fine potrebbe favorire una maggiore fiducia nell'automazione da parte del pubblico, aumentando anche la produttività. Nel futuro, i ricercatori intendono mettere a disposizione di altri ricercatori HRI i database generati nel loro studio.
"I nostri prossimi studi si concentreranno sullo sviluppo di un'applicazione di interfaccia utente completa del sistema di calcolo fisiologico per l'elaborazione dei segnali di registrazione, estrarre informazioni e applicare algoritmi di apprendimento automatico per fornire feedback al robot, " ha detto Kumar. "L'obiettivo finale di questo lavoro è generare un database che può essere utilizzato per approfondire la comprensione di come le risposte fisiologiche umane possono essere dedotte per provocare un comportamento di movimento adattivo del robot".
© 2019 Scienza X Rete