Credito:Li et al.
Negli ultimi anni, un numero crescente di ricercatori ha esplorato l'uso di braccia robotiche o mani abili per risolvere una serie di compiti quotidiani. Mentre molti di loro hanno affrontato con successo compiti semplici, come la presa o la manipolazione di base, compiti complessi che comportano più passaggi e movimenti precisi/strategici si sono finora rivelati più difficili da affrontare.
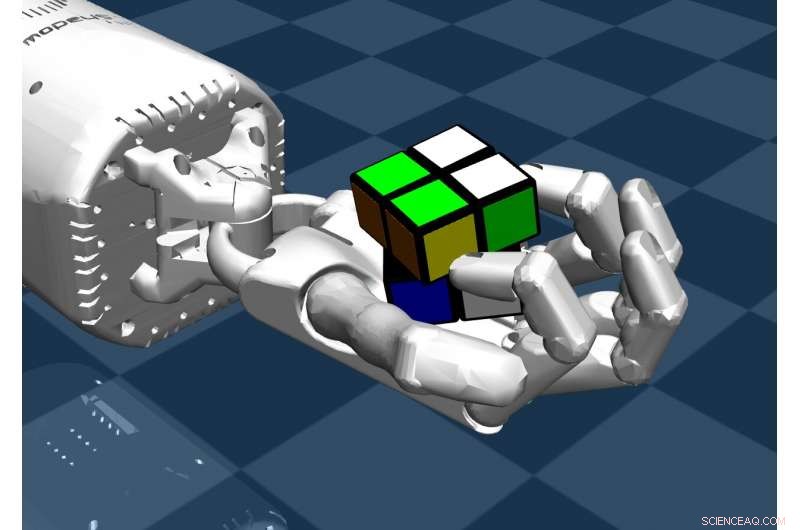
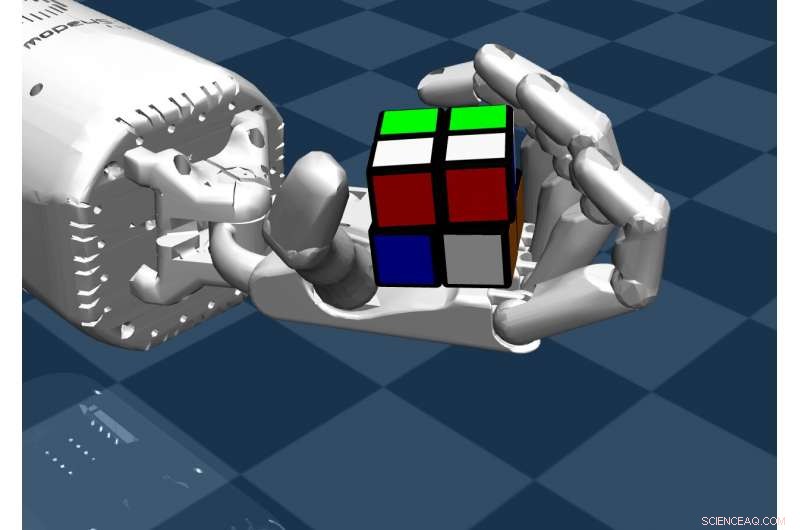
Un team di ricercatori dell'Università cinese di Hong Kong e del Tencent AI Lab ha recentemente sviluppato un approccio basato sull'apprendimento profondo per risolvere un cubo di Rubik usando una mano abile con più dita. Il loro approccio, presentato in un articolo pre-pubblicato su arXiv, consente a una mano abile di risolvere compiti di manipolazione della mano più avanzati, come il famoso puzzle del cubo di Rubik.
Un cubo di Rubik è un cubo di plastica ricoperto di quadrati multicolori che possono essere spostati in diverse posizioni. L'obiettivo del puzzle è di ruotare strategicamente le sezioni del cubo fino a quando tutti i quadrati su ciascuna delle sue facce sono dello stesso colore.
"Vedere alcuni ricercatori usare le mani di robot con più dita per compiti come posare un oggetto e manipolare uno strumento, abbiamo considerato se potevamo utilizzare una mano robotica per compiti più complicati, come risolvere un cubo di Rubik, "Tingguang Li, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore.
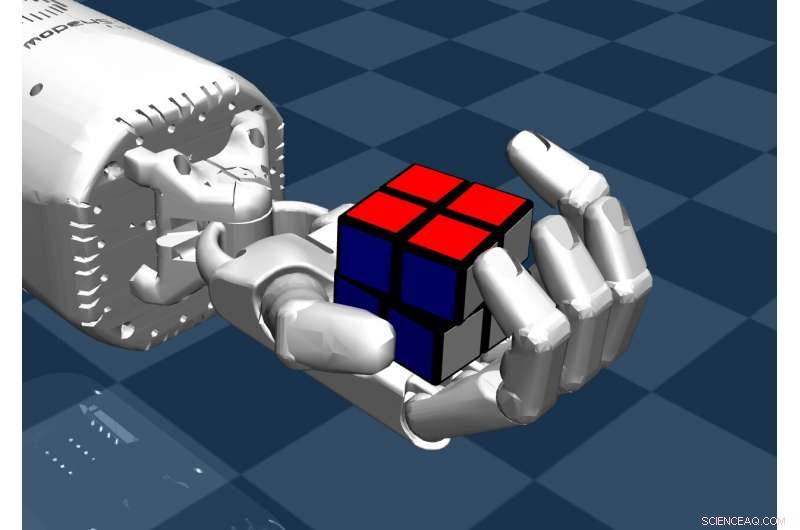
Per affrontare il puzzle del cubo di Rubik usando una mano abile, Li e i suoi colleghi hanno sviluppato un modello gerarchico di apprendimento per rinforzo profondo che essenzialmente separa il compito in una fase di pianificazione e manipolazione. Nel loro studio, i ricercatori hanno applicato questo approccio a una mano abile a cinque dita chiamata Shadow Hand.
"Le sfide nel risolvere un cubo di Rubik usando una mano robotica sono duplici:primo, controllare una mano robotica è molto difficile poiché ha un alto grado di libertà; secondo, risolvere un cubo di Rubik richiede una lunga sequenza di movimenti, " Li ha spiegato. "La nostra idea combina un algoritmo di apprendimento per rinforzo profondo, che ha molte applicazioni di successo, e la conoscenza umana. L'obiettivo è mostrare la destrezza di una mano robotica e risolvere un cubo di Rubik mescolato a caso con un alto tasso di successo.
Il modello gerarchico proposto dai ricercatori ha due componenti chiave:uno per la pianificazione e uno per la manipolazione. Inizialmente, la componente di pianificazione (cioè, un risolutore di cubi basato su modello) identifica la sequenza di modalità ottimale per risolvere il puzzle. Quindi, il controllore della manipolazione (cioè, un operatore cubo senza modello) controlla le dita della mano abile per eseguire questi passaggi.
"Il nostro approccio ha due livelli:lo strato superiore pianifica una traiettoria per risolvere un cubo di Rubik che è composto da azioni atomiche, e lo strato inferiore impara a implementare ogni azione atomica, " ha detto Li. "Le azioni atomiche vengono apprese tramite un modello di apprendimento per rinforzo profondo, sbarazzarsi della progettazione manuale di complicati controller di basso livello."
I ricercatori hanno addestrato e valutato il loro modello utilizzando un simulatore ad alta fedeltà, che hanno anche costruito. Hanno testato le prestazioni del loro modello in una serie di esperimenti in cui la mano abile virtuale è stata alimentata con 1400 cubi di Rubik mescolati casualmente e ha scoperto che ha raggiunto un tasso medio di successo del 90,3 percento.
"Abbiamo dimostrato che la mano robotica con più dita ha un enorme potenziale per compiti complicati, Li ha detto. "L'integrazione di algoritmi basati sull'apprendimento può aiutare a ridurre il pesante lavoro di progettazione manuale degli algoritmi di controllo. Spero che questo attiri più ricercatori in quest'area e li incoraggi a sviluppare nuovi approcci per aumentare ulteriormente la destrezza delle mani dei robot".
Credito:Li et al.

Credito:Li et al.
Credito:Li et al.
In contrasto con gli approcci precedentemente proposti, il modello sviluppato da Li e dai suoi colleghi consente il completamento di un compito di manipolazione manuale più complesso utilizzando una mano abile, risolvendo specificamente un cubo di Rubik. Finora, i ricercatori hanno valutato il loro approccio solo in simulazioni, ma ora stanno progettando di applicare il loro algoritmo su una vera mano robotica.
© 2019 Science X Network