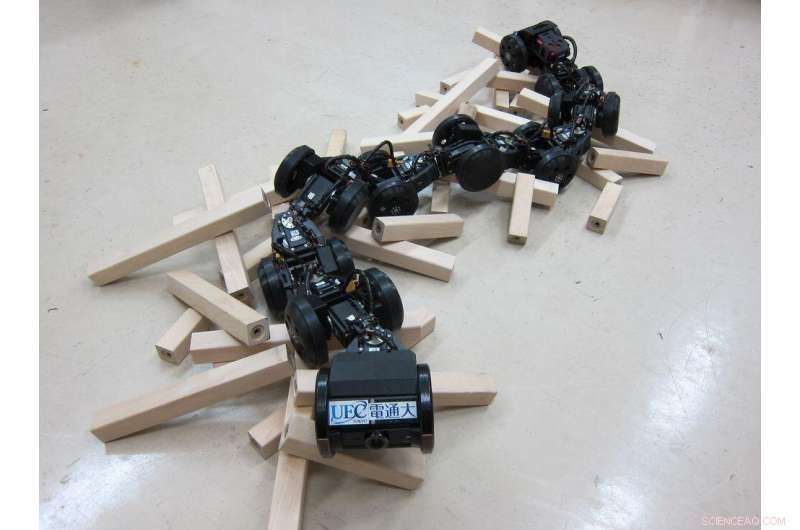
Il robot serpente T 2 Serpente-3. Credito:University of Electro Communications
I robot mobili articolati simili a serpenti possono entrare in spazi ristretti e arrampicarsi sugli ostacoli usando i loro corpi lunghi e sottili, e sono efficaci per l'ispezione di spazi ristretti e le operazioni di ricerca e salvataggio sui siti di disastri. Però, è difficile controllare i loro movimenti precisi perché hanno così tanti attuatori.
Ora, Motoyasu Tanaka e colleghi della University of Electrocommunications Tokyo, proporre metodi per controllare robot simili a serpenti per lo sterzo tridimensionale, salire le scale e manipolare oggetti, e hanno sviluppato il robot serpente T 2 Serpente-3. Nello sterzo tridimensionale, il robot segue il terreno circostante rilassando le articolazioni, e poi riprende a muoversi dalla postura del robot. L'operatore può facilmente controllare e spostare il robot su terreni irregolari con questo metodo. Per salire le scale, il robot sposta autonomamente il suo movimento sulle scale dalla testa alla coda al momento opportuno perché i dati dei sensori collegati alla parte inferiore del robot vengono utilizzati per attivare il movimento. Per manipolare un oggetto, la posizione e l'orientamento della pinza fissata sulla testa del robot è controllata mantenendo la postura appropriata selezionando autonomamente l'assegnazione delle ruote sollevate/a terra. Sebbene il robot T 2 Snake-3 ha circa trenta attuatori, l'operatore può azionare facilmente il robot utilizzando questi metodi e un gamepad.
Il robot T 2 Snake-3 è entrato in spazi ristretti, salendo un gradino alto un metro, salire le scale, e valvole rotanti utilizzando i metodi proposti. Il robot simile a un serpente è stato controllato in modo efficace per le apparecchiature di ispezione e la risposta ai disastri.