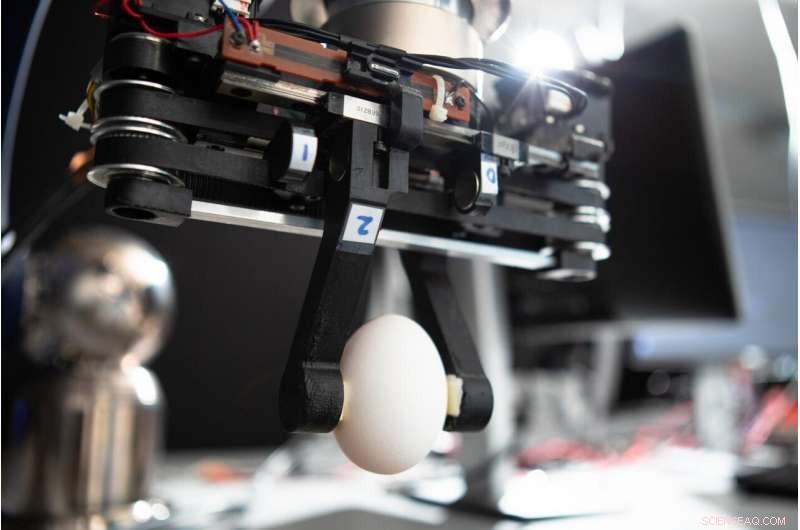
Una pinza robotica sviluppata nel laboratorio dell'ingegnere dell'Università di Buffalo, Ehsan Esfahani, utilizza la repulsione tra i magneti per regolare la rigidità della sua presa, migliorare la sicurezza. Credito:Douglas Levere/Università di Buffalo
Le mani umane sono straordinariamente abili nel manipolare una serie di oggetti. Possiamo prendere un uovo o una fragola senza romperli. Possiamo piantare un chiodo.
Una caratteristica che ci consente di svolgere una varietà di compiti è la capacità di alterare la fermezza della nostra presa, e gli ingegneri dell'Università di Buffalo hanno sviluppato una mano robotica a due dita che condivide questa caratteristica.
Il design della mano robotica le consente di assorbire energia dagli impatti durante le collisioni. Ciò impedisce che qualsiasi cosa stia tenendo il robot si rompa, e rende anche più sicuro per le persone lavorare con e vicino alle macchine.
Tali pinze sarebbero una risorsa preziosa per la partnership uomo-robot nelle catene di montaggio nel settore automobilistico, imballaggi elettronici e altre industrie, dice Ehsan Esfahani, dottorato di ricerca, professore associato di ingegneria meccanica e aerospaziale presso la UB School of Engineering and Applied Sciences.
"La nostra pinza robotica imita la capacità della mano umana di regolare la rigidità della presa. Queste pinze sono progettate per robot collaborativi che lavorano insieme a persone, " Esfahani dice. "Saranno aiutanti, quindi devono essere al sicuro, e le pinze a rigidità variabile aiutano a raggiungere questo obiettivo."
Un nuovo studio pubblicato online il 10 settembre in Transazioni IEEE sull'elettronica industriale mette in evidenza il design sicuro del dispositivo, anche attraverso esperimenti che mostrano come le caratteristiche di assorbimento degli urti della pinza impediscono a uno spaghetto di rompersi durante una collisione.
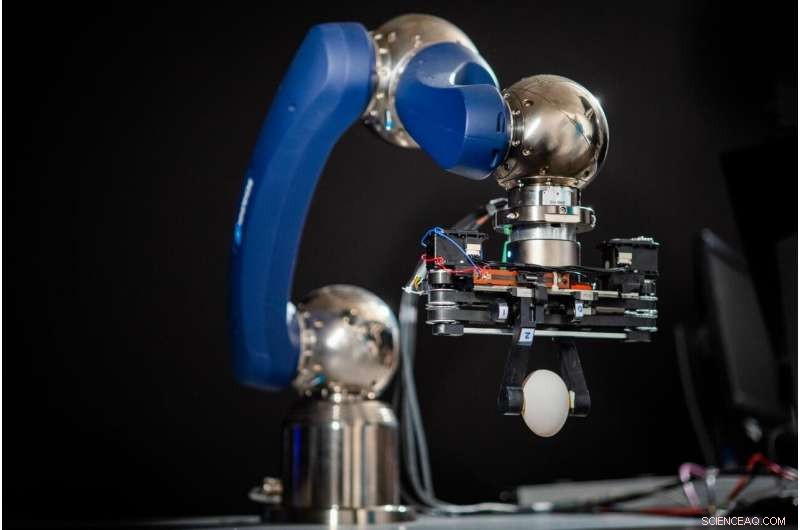
Una pinza robotica sviluppata nel laboratorio dell'ingegnere Ehsan Esfahani dell'Università di Buffalo. La pinza è fissata a un braccio robotico disponibile in commercio. Credito:Douglas Levere/Università di Buffalo
I magneti danno a questo robot un tocco morbido
Esfahani spiega che i magneti sono il segreto della versatilità della pinza robotica.
Invece di avere due dita fisse in posizione, ciascuna delle dita della pinza ha una base magnetica che si trova tra due magneti al neodimio che respingono, o spingere contro, il dito.
Il traferro tra i magneti agisce come una molla, creando un piccolo cedimento quando la mano raccoglie un oggetto o si scontra con una forza esterna. La rigidità dell'impugnatura può essere regolata anche aumentando o diminuendo lo spazio tra i magneti.
Nel nuovo giornale, Esfahani e Amirhossein Memar, un ex UB Ph.D. candidato in ingegneria meccanica e aerospaziale, relazione su queste caratteristiche di sicurezza.
In una serie di test, gli ingegneri hanno messo un bastoncino di spaghetti per il lungo tra le dita della mano robotica. Quando la pinza si è schiantata contro un oggetto fisso, il dispositivo ha rilevato la forza esterna applicata, che ha indotto i magneti a regolare la loro posizione, riducendo temporaneamente la rigidità della presa e consentendo alla pinza di assorbire parte dell'energia dalla collisione.
Il risultato finale? Il bastoncino di spaghetti è rimasto intero.
Prossimi passi nello sviluppo
Esfahani osserva che la pinza che il suo team sta sviluppando può essere collegata a bracci robotici disponibili in commercio che sono già in uso in molte strutture. Ciò potrebbe ridurre i costi di adattamento della tecnologia per le aziende interessate a migliorare la sicurezza e le capacità delle macchine esistenti.
Esfahani sta lanciando una startup per commercializzare la pinza, tecnologia di licenza da UB.
La sua squadra ha ricevuto $ 55, 000 dal Buffalo Fund:Accelerator—finanziato dall'Innovation Hub, che è amministrato da UB e supportato dall'Empire State Development, per sviluppare ulteriormente la mano robotica. Oltre a perfezionare l'attuale design della pinza, il team può anche esplorare progressi come l'aggiunta di un terzo dito.
I ricercatori che sono stati coinvolti nella progettazione e nel test della pinza includono il dottorato di ricerca. studente Sri Sadhan Jujjavarapu e Memar, il coautore del nuovo studio sui bastoncini di spaghetti, che ha conseguito il dottorato di ricerca. da UB ed è ora ricercatore post-dottorato presso Facebook Reality Labs.