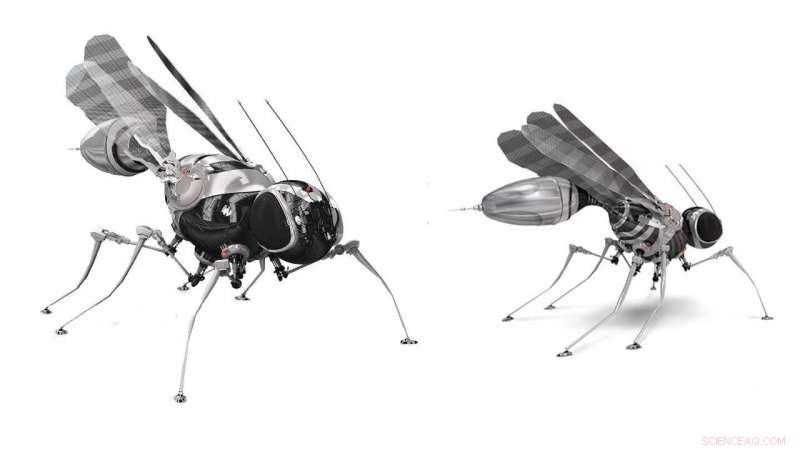
Concept design di robot volanti. Credito:P. Ramdya, EPFL
"Pensa solo a cosa può fare una mosca, "dice il professor Pavan Ramdya, il cui laboratorio al Brain Mind Institute dell'EPFL, con il laboratorio del professor Pascal Fua nell'Istituto di informatica dell'EPFL, condotto lo studio. "Una mosca può arrampicarsi su un terreno che un robot su ruote non sarebbe in grado di fare."
Le mosche non sono esattamente accattivanti per gli umani. Li associamo giustamente a esperienze poco appetitose nella nostra vita quotidiana. Ma c'è un percorso inaspettato per la redenzione:i robot. Si scopre che le mosche hanno alcune caratteristiche e abilità che possono informare un nuovo design per i sistemi robotici.
"A differenza della maggior parte dei vertebrati, le mosche possono arrampicarsi su quasi tutti i terreni, " dice Ramdya. "Possono attaccarsi a pareti e soffitti perché hanno cuscinetti adesivi e artigli sulla punta delle gambe. Questo permette loro di andare praticamente ovunque. È interessante anche perché se puoi riposare su qualsiasi superficie, puoi gestire il tuo dispendio energetico aspettando il momento giusto per agire."
È stata questa visione di estrarre i principi che governano il comportamento delle mosche per informare la progettazione di robot che ha guidato lo sviluppo di DeepFly3D, un sistema di motion-capture per la mosca Drosophila melanogaster, un organismo modello che è usato quasi ubiquitariamente in biologia.
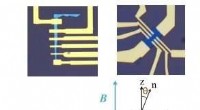
Nella configurazione sperimentale di Ramdya, una mosca cammina sopra una minuscola palla galleggiante, come un tapis roulant in miniatura, mentre sette telecamere registrano ogni suo movimento. La parte superiore della mosca è incollata su un palco inamovibile in modo che rimanga sempre in posizione mentre si cammina sulla palla. Tuttavia, la mosca "crede" di muoversi liberamente.
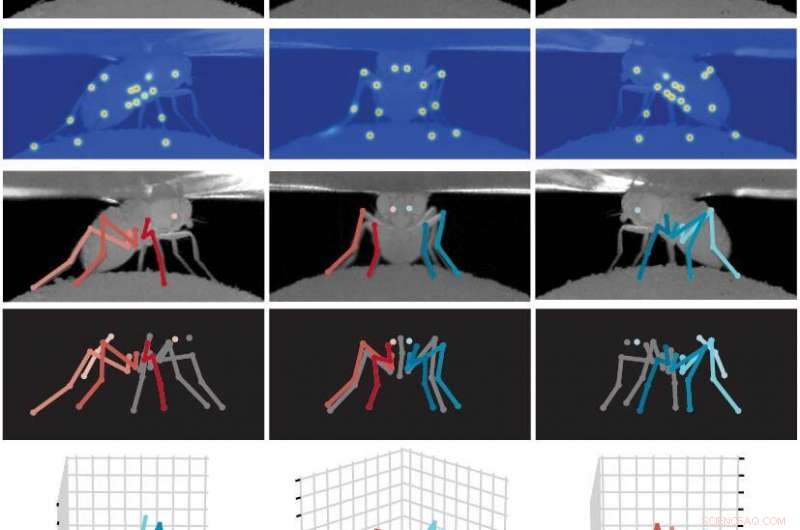
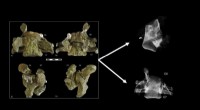
Diverse pose del moscerino della frutta Drosophila melanogaster vengono catturate da più telecamere ed elaborate con il software DeepFly3D. Credito:P. Ramdya, EPFL
Le immagini della telecamera raccolte vengono quindi elaborate da DeepFly3D, un software di deep learning sviluppato da Semih Günel, un dottorato di ricerca studente che lavora con i laboratori di Ramdya e Fua. "Questo è un bell'esempio di dove una collaborazione interdisciplinare era necessaria e trasformativa, " dice Ramdya. "Sfruttando l'informatica e le neuroscienze, abbiamo affrontato una sfida di vecchia data".
La particolarità di DeepFly3D è che può dedurre la posa 3D della mosca, o anche di altri animali, il che significa che può prevedere ed eseguire automaticamente misurazioni comportamentali con una risoluzione senza precedenti per una varietà di applicazioni biologiche. Il software non ha bisogno di essere calibrato manualmente e utilizza le immagini della fotocamera per rilevare e correggere automaticamente eventuali errori commessi nei calcoli della posa della mosca. Finalmente, utilizza anche l'apprendimento attivo per migliorare le proprie prestazioni.
DeepFly3D apre un modo per modellare in modo efficiente e accurato i movimenti, pose, e angoli articolari di un moscerino della frutta in tre dimensioni. Questo può ispirare un modo standard per modellare automaticamente la posa 3D anche in altri organismi.
"La mosca, come organismo modello, bilancia molto bene la trattabilità e la complessità, " dice Ramdya. "Se impariamo come fa quello che fa, possiamo avere un impatto importante sulla robotica e sulla medicina e, forse la cosa più importante, possiamo ottenere queste intuizioni in un periodo di tempo relativamente breve".