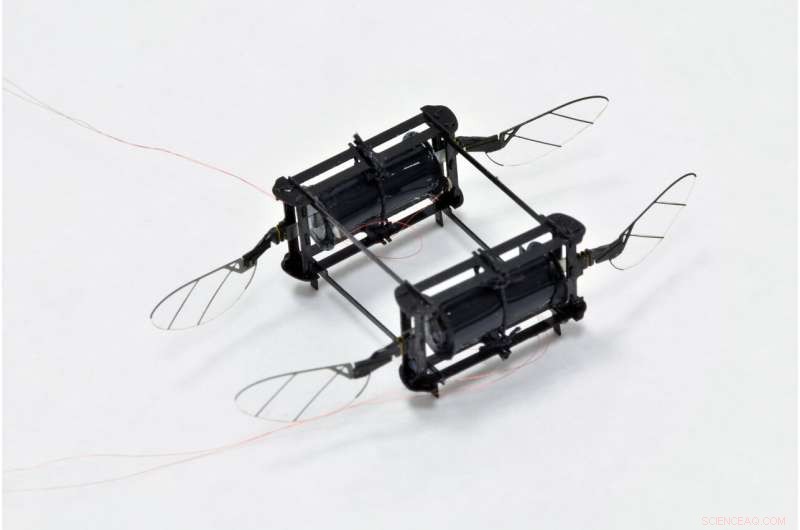
A quattro ali, il modello a due attuatori potrebbe volare in un ambiente disordinato, superamento di più collisioni in un unico volo. Credito:Harvard Microrobotics Lab
La vista di un RoboBee che sbanda verso un muro o si schianta contro una scatola di vetro potrebbe aver scatenato il panico nei ricercatori dell'Harvard Microrobotics Laboratory della Harvard John A. Paulson School of Engineering and Applied Science (SEAS), ma non più.
I ricercatori del SEAS e del Wyss Institute for Biologically Inspired Engineering hanno sviluppato un RoboBee resiliente alimentato da morbidi muscoli artificiali che possono schiantarsi contro i muri, cadere sul pavimento, e si scontrano con altri RoboBee senza subire danni. È il primo microrobot alimentato da attuatori morbidi per ottenere un volo controllato.
"C'è stata una grande spinta nel campo della microrobotica per realizzare robot mobili con attuatori morbidi perché sono così resistenti, "ha detto Yufeng Chen, un ex studente laureato e borsista post-dottorato presso SEAS e primo autore del documento. "Però, molte persone sul campo erano scettiche sul fatto che potessero essere usati per robot volanti perché la densità di potenza di quegli attuatori semplicemente non era abbastanza alta e sono notoriamente difficili da controllare. Il nostro attuatore ha una densità di potenza e una controllabilità sufficientemente elevate per ottenere il volo in bilico".
La ricerca è pubblicata su Natura .
Per risolvere il problema della densità di potenza, i ricercatori si sono basati sugli attuatori morbidi ad azionamento elettrico sviluppati nel laboratorio di David Clarke, il Professore di Materiali della Famiglia Tarr Estesa. Questi attuatori morbidi sono realizzati utilizzando elastomeri dielettrici, materiali morbidi con buone proprietà isolanti, che si deformano quando viene applicato un campo elettrico.
Migliorando la conduttività dell'elettrodo, i ricercatori sono stati in grado di far funzionare l'attuatore a 500 Hertz, alla pari con gli attuatori rigidi utilizzati in precedenza in robot simili.
Un'altra sfida quando si ha a che fare con attuatori morbidi è che il sistema tende a deformarsi e diventare instabile. Per risolvere questa sfida, i ricercatori hanno costruito una cellula leggera con un pezzo di filo di costrizione verticale per impedire all'attuatore di deformarsi.
Gli attuatori morbidi possono essere facilmente assemblati e sostituiti in questi robot di piccole dimensioni. Per dimostrare le varie capacità di volo, i ricercatori hanno costruito diversi modelli di RoboBee con alimentazione morbida. Un modello a due ali poteva decollare da terra ma non aveva alcun controllo aggiuntivo. A quattro ali, il modello a due attuatori potrebbe volare in un ambiente disordinato, superamento di più collisioni in un unico volo.
"Un vantaggio della piccola scala, robot a bassa massa è la loro resilienza agli impatti esterni, " ha detto Elizabeth Farrell Helbling, un ex studente laureato presso SEAS e coautore del documento. "L'attuatore morbido offre un ulteriore vantaggio perché può assorbire l'impatto meglio delle strategie di attuazione tradizionali. Ciò sarebbe utile in potenziali applicazioni come il volo tra le macerie per missioni di ricerca e soccorso. "
Un otto ala, il modello a quattro attuatori ha dimostrato un volo in bilico controllato, il primo per un microrobot volante a propulsione morbida.
Prossimo, i ricercatori mirano ad aumentare l'efficienza del robot soft-powered, che è ancora molto indietro rispetto ai robot volanti più tradizionali.
"Attuatori morbidi con proprietà simili ai muscoli e attivazione elettrica rappresentano una grande sfida nella robotica, "dice Robert Wood, Charles River Professore di ingegneria e scienze applicate in SEAS, membro principale della facoltà del Wyss Institute for Biologically Inspired Engineering e autore senior del documento. "Se potessimo progettare muscoli artificiali ad alte prestazioni, il cielo è il limite per i robot che potremmo costruire."