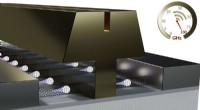
I ricercatori del MIT e della Toyota hanno progettato un nuovo modello che soppesa varie incertezze e rischi per aiutare i veicoli autonomi a determinare quando è sicuro immettersi nel traffico agli incroci con oggetti che ostruiscono la vista, come edifici che bloccano la linea di vista. Credito:Massachusetts Institute of Technology
I ricercatori del MIT e della Toyota hanno progettato un nuovo modello per aiutare i veicoli autonomi a determinare quando è sicuro immettersi nel traffico agli incroci con visuali ostruite.
La navigazione negli incroci può essere pericolosa sia per le auto senza conducente che per gli esseri umani. Nel 2016, circa il 23% degli incidenti stradali mortali e il 32% non fatali negli Stati Uniti si sono verificati agli incroci, secondo uno studio del Dipartimento dei trasporti del 2018. I sistemi automatizzati che aiutano le auto senza conducente e i conducenti umani a guidare attraverso gli incroci possono richiedere la visibilità diretta degli oggetti che devono evitare. Quando la loro linea di vista è bloccata da edifici vicini o altri ostacoli, questi sistemi possono fallire.
I ricercatori hanno sviluppato un modello che utilizza invece la propria incertezza per stimare il rischio di potenziali collisioni o altre interruzioni del traffico a tali incroci. Pesa diversi fattori critici, compresi tutti gli ostacoli visivi nelle vicinanze, rumore ed errori del sensore, la velocità di altre auto, e anche l'attenzione degli altri conducenti. Sulla base del rischio misurato, il sistema può consigliare all'auto di fermarsi, entrare nel traffico, o spostati in avanti per raccogliere più dati.
"Quando ti avvicini a un incrocio c'è un potenziale pericolo di collisione. Telecamere e altri sensori richiedono una linea di vista. Se ci sono occlusioni, non hanno abbastanza visibilità per valutare se è probabile che stia arrivando qualcosa, "dice Daniela Rus, direttore del Laboratorio di Informatica e Intelligenza Artificiale (CSAIL) e Andrea ed Erna Viterbi Professore di Ingegneria Elettrica e Informatica. "In questo lavoro, utilizziamo un modello di controllo predittivo più robusto rispetto all'incertezza, per aiutare i veicoli a navigare in sicurezza in queste difficili situazioni stradali."
I ricercatori hanno testato il sistema in più di 100 prove su auto telecomandate che giravano a sinistra in una trafficata, incrocio ostruito in una città finta, con altre auto che guidano costantemente attraverso la strada trasversale. Gli esperimenti hanno coinvolto automobili completamente autonome e automobili guidate da esseri umani ma assistite dal sistema. In tutti i casi, il sistema ha aiutato con successo le auto a evitare la collisione dal 70 al 100 percento delle volte, a seconda di vari fattori. Altri modelli simili implementati nelle stesse auto telecomandate a volte non potevano completare una singola prova senza una collisione.
Ad unirsi a Rus sulla carta sono:il primo autore Stephen G. McGill, Guy Rossman, e Luke Fletcher del Toyota Research Institute (TRI); studenti laureati Teddy Ort e Brandon Araki, ricercatrice Alyssa Pierson, e postdoc Igor Gilitschenski, tutto CSAIL; Sertac Karaman, un professore associato di aeronautica e astronautica al MIT; e John J. Leonard, il Samuel C. Collins Professor of Mechanical and Ocean Engineering del MIT e un consulente tecnico del TRI.
Modellazione di segmenti stradali
Il modello è studiato appositamente per incroci stradali in cui non c'è il semaforo e l'auto deve cedere prima di immettersi nel traffico all'incrocio, come svoltare a sinistra attraverso più corsie o rotatorie. Nel loro lavoro, i ricercatori hanno diviso una strada in piccoli segmenti. Questo aiuta il modello a determinare se un dato segmento è occupato per stimare un rischio condizionale di collisione.
Le auto autonome sono dotate di sensori che misurano la velocità di altre auto sulla strada. Quando un sensore rileva un'auto di passaggio che viaggia in un segmento visibile, il modello usa quella velocità per prevedere la progressione dell'auto attraverso tutti gli altri segmenti. Una "rete bayesiana" probabilistica considera anche le incertezze, come sensori rumorosi o cambiamenti di velocità imprevedibili, per determinare la probabilità che ogni segmento sia occupato da un'auto di passaggio.
A causa delle occlusioni vicine, però, questa singola misurazione potrebbe non essere sufficiente. Fondamentalmente, se un sensore non riesce mai a vedere un segmento di strada designato, quindi il modello gli assegna un'alta probabilità di essere occluso. Da dove è posizionata l'auto, c'è un aumento del rischio di collisione se l'auto si immette velocemente nel traffico. Questo incoraggia l'auto a spingersi in avanti per avere una visione migliore di tutti i segmenti occlusi. Mentre l'auto lo fa, il modello riduce la sua incertezza e, a sua volta, rischio.
Ma anche se il modello fa tutto correttamente, c'è ancora errore umano, quindi il modello stima anche la consapevolezza di altri conducenti. "In questi giorni, i conducenti potrebbero inviare messaggi o essere distratti in altro modo, quindi il tempo necessario per reagire potrebbe essere molto più lungo, " dice McGill. "Modelliamo quel rischio condizionale, anche."
Ciò dipende dal calcolo della probabilità che un guidatore abbia visto o non abbia visto l'auto autonoma entrare nell'incrocio. Fare così, il modello esamina il numero di segmenti attraversati da un'auto in movimento prima dell'incrocio. Più segmenti aveva occupato prima di raggiungere l'incrocio, maggiore è la probabilità che abbia individuato l'auto autonoma e minore è il rischio di collisione.
Il modello somma tutte le stime di rischio dalla velocità del traffico, occlusioni, sensori rumorosi, e consapevolezza del conducente. Considera anche quanto tempo impiegherà l'auto autonoma per guidare un percorso prestabilito attraverso l'incrocio, così come tutti i punti di sosta sicuri per l'attraversamento del traffico. Questo produce una stima del rischio totale.
Tale stima del rischio viene aggiornata continuamente per qualsiasi punto in cui l'auto si trovi all'incrocio. In presenza di occlusioni multiple, ad esempio, si spingerà in avanti, poco per volta, per ridurre l'incertezza. Quando la stima del rischio è sufficientemente bassa, il modello dice all'auto di attraversare l'incrocio senza fermarsi. Indugiare nel mezzo dell'incrocio troppo a lungo, i ricercatori hanno scoperto, aumenta anche il rischio di collisione.
Assistenza e intervento
L'esecuzione del modello su auto telecomandate in tempo reale indica che è efficiente e abbastanza veloce da essere implementato in auto di prova autonome su vasta scala nel prossimo futuro, dicono i ricercatori. (Molti altri modelli sono troppo pesanti dal punto di vista computazionale per funzionare su quelle auto.) Il modello necessita ancora di test molto più rigorosi prima di essere utilizzato per l'implementazione nel mondo reale nei veicoli di produzione.
Il modello servirebbe come metrica di rischio supplementare che un sistema di veicoli autonomi può utilizzare per ragionare meglio sulla guida in sicurezza attraverso gli incroci. Il modello potrebbe anche essere potenzialmente implementato in alcuni "sistemi avanzati di assistenza alla guida" (ADAS), dove gli esseri umani mantengono il controllo condiviso del veicolo.
Prossimo, i ricercatori mirano a includere altri fattori di rischio impegnativi nel modello, come la presenza di pedoni all'interno e intorno allo svincolo stradale.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.