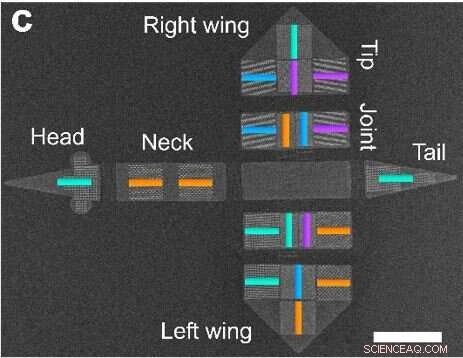
L'immagine al microscopio elettronico a scansione mostra il costrutto simile a un uccello con disposizioni di magneti su nanoscala. I magneti possono essere magnetizzati in diversi orientamenti paralleli alle barre di colore. Programmando la loro magnetizzazione, i ricercatori possono fare in modo che gli uccelli eseguano diversi movimenti in un campo magnetico. Credito:Istituto Paul Scherrer/Istituto Federale Svizzero di Tecnologia, Zurigo
I ricercatori dell'Istituto Paul Scherrer PSI e dell'ETH di Zurigo hanno sviluppato una micromacchina in grado di eseguire diverse azioni. Prima i nanomagneti nei componenti dei microrobot sono programmati magneticamente e poi i vari movimenti sono controllati da campi magnetici. Tali macchine, che sono larghe solo poche decine di micrometri, potrebbe essere usato, Per esempio, nel corpo umano per eseguire piccole operazioni. I ricercatori hanno ora pubblicato i loro risultati sulla rivista scientifica Natura .
Il robot, che misura solo pochi micrometri di diametro, ricorda un uccello di carta realizzato con gli origami, l'arte giapponese di piegare la carta. Ma, a differenza di una struttura di carta, il robot si muove come per magia senza una forza visibile. Sbatte le ali o piega il collo e ritrae la testa. Queste azioni sono tutte rese possibili dal magnetismo.
I ricercatori del Paul Scherrer Institute PSI e dell'ETH di Zurigo hanno assemblato la micromacchina da materiali che contengono piccoli nanomagneti. Questi nanomagneti possono essere programmati per assumere un particolare orientamento magnetico. Quando i nanomagneti programmati vengono poi esposti a un campo magnetico, su di essi agiscono forze specifiche. Se questi magneti si trovano in componenti flessibili, le forze che agiscono su di essi fanno muovere i componenti.
Programmazione dei nanomagneti
I nanomagneti possono essere programmati più e più volte. Questa riprogrammazione si traduce in forze diverse, e nuovi movimenti risultano.
Per la costruzione del microrobot, i ricercatori hanno fabbricato matrici di magneti al cobalto su sottili fogli di nitruro di silicio. L'uccello costruito con questo materiale potrebbe quindi eseguire vari movimenti, come svolazzare, in bilico, girando o scivolando di lato.
"I movimenti eseguiti dal microrobot avvengono in millisecondi, "dice Laura Heyderman, capo del Laboratorio di Esperimenti sui Materiali Multiscala al PSI e docente di Sistemi Mesoscopici presso il Dipartimento di Materiali, ETH Zurigo. "Ma la programmazione dei nanomagneti richiede solo pochi nanosecondi. Ciò rende possibile programmare i diversi movimenti uno dopo l'altro. Ciò significa che il minuscolo microuccello può prima sbattere le ali, poi scivolare di lato e poi sbattere di nuovo. "Se necessario, l'uccello potrebbe anche librarsi in mezzo, "dice Heydermann.
Laura Heyderman (a sinistra) e Tian-Yun Huang (al centro) guardano un modello dell'uccello origami, mentre Jizhai Cui osserva il vero microrobot al microscopio. Quello che riesce a vedere è mostrato nel video realizzato dai ricercatori. Credito:Istituto Paul Scherrer/Mahir Dzambegovic
Microrobot intelligenti
Questo nuovo concetto è un passo importante verso i micro e nanorobot che non solo immagazzinano informazioni per dare una particolare azione, ma può anche essere riprogrammato per svolgere compiti diversi. "È ipotizzabile che, nel futuro, una micromacchina autonoma navigherà attraverso i vasi sanguigni umani e svolgerà compiti biomedici come uccidere le cellule tumorali, " spiega Bradley Nelson, capo del dipartimento di ingegneria meccanica e di processo presso l'ETH di Zurigo. "Sono ipotizzabili anche altri campi di applicazione, ad esempio microelettronica flessibile o microlenti che ne modificano le proprietà ottiche, "dice Tianyun Huang, ricercatore presso l'Istituto di robotica e sistemi intelligenti dell'ETH di Zurigo.
Inoltre, sono possibili applicazioni in cui cambiano le caratteristiche delle superfici. "Per esempio, possono essere utilizzati per creare superfici che possono essere bagnate dall'acqua o respingere l'acqua, "dice Jizhai Cui, un ingegnere e ricercatore nel Mesoscopic Systems Lab.