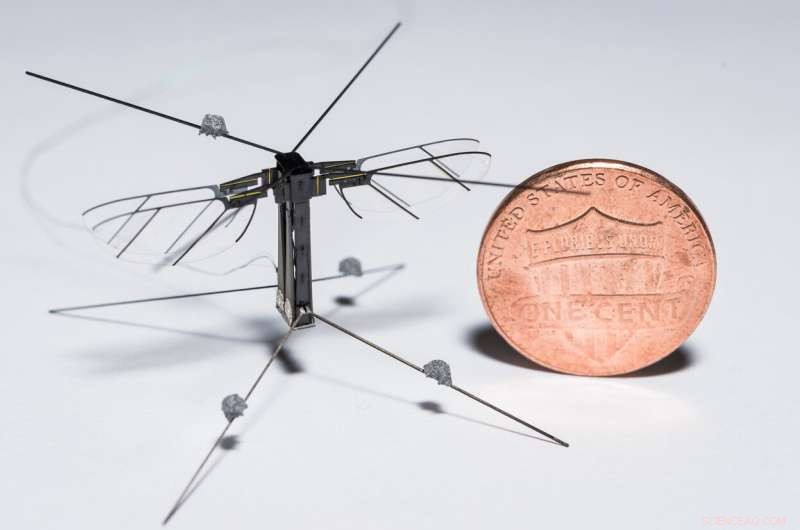
Insetto robotico volante Bee+. Credito:Xiufeng Yang.
Uno dei problemi chiave che devono affrontare i ricercatori nel campo della microrobotica è la progettazione e l'implementazione di controller affidabili per microveicoli aerei a scala di insetti (FWMAV), che sono piccoli robot volanti tipicamente ispirati agli insetti. Infatti, sebbene questi robot delle dimensioni di un insetto potrebbero avere numerose applicazioni utili, ad esempio, assistere gli esseri umani nelle missioni di ricerca e soccorso o in agricoltura, lo sviluppo di controller che corrispondano alle loro dimensioni e struttura si è finora rivelato difficile.
I ricercatori della University of Southern California (USC) hanno recentemente condotto uno studio per esplorare le sfide nella progettazione di questi controller. Nella loro carta, prepubblicato su arXiv, introducono un nuovo approccio unificante che potrebbe informare lo sviluppo di tecniche più efficaci per il controllo dei FWMAV. I ricercatori dietro lo studio fanno parte del laboratorio di sistemi microrobotici autonomi (AMSL), che è l'erede di una linea di ricerca iniziata all'UC Berkeley più di 20 anni fa, ha continuato ad Harvard dal 2005 ed è arrivato alla USC nel 2013.
"Noi, come una squadra, condividere lo stesso sogno di molti nella comunità della microrobotica; la visione di creare insetti artificiali completamente autonomi in grado di operare in modo intelligente in ambienti altamente destrutturati, " Prof. Nestor O Perez-Arancibia, il ricercatore principale (PI) per lo studio, ha detto a TechXplore. "Personalmente, Mi ispiro alla natura. Le nostre macchine, compreso Ape+, che è un fantastico pezzo di ingegneria, ancora in ritardo rispetto ai veri insetti in termini di capacità acrobatiche, attuazione, rilevamento, potenza di calcolo, eccetera."
Perez-Arancibia conduce da diversi anni ricerche sui sistemi microrobotici. Crede che tutte le macchine create dall'uomo potrebbero essere migliorate se traendo ispirazione dalla natura, per esempio osservando e replicando il comportamento o le caratteristiche delle api, farfalle e zanzare.

Insetto robotico volante Bee+. Credito:Xiufeng Yang.
Nel loro studio, Perez-Arancibia e i suoi colleghi hanno studiato il controllo degli insetti volanti utilizzando due diverse piattaforme sperimentali:un robot a due ali simile a un'ape e il microrobot Bee+ a quattro ali sviluppato alla USC. In una serie di esperimenti, sono stati in grado di dimostrare che una tecnica che utilizza le coordinate dei quaternioni per il controllo dell'assetto, che è progettato per controllare veicoli senza equipaggio con quattro rotori, può essere applicato per guidare entrambi questi insetti robotici.
"Siamo stati in grado di semplificare qualcosa che molti ricercatori considerano molto difficile, " Ha detto Perez-Arancibia. "Mi piace credere che questo sia un caso in cui la modellazione intelligente (cioè, guardando il problema da una prospettiva nuova e 'migliore'), possiamo comprendere e analizzare fenomeni complessi apparentemente intrattabili che possono aiutarci a sviluppare progetti robotici migliori, soprattutto in termini di generazione di forza aerodinamica, configurazione e attuazione del meccanismo."
I risultati dei test effettuati da Perez-Arancibia e dai suoi colleghi suggeriscono che la strategia generica che hanno introdotto potrebbe essere utilizzata per controllare diversi tipi di insetti artificiali che condividono alcune caratteristiche comuni. Sebbene abbiano dimostrato in modo specifico l'efficacia di questa strategia su un robot a due ali e sul robot Bee+ a quattro ali, potrebbe potenzialmente essere applicato anche ad altri microrobot simili a insetti.
Perez-Arancibia ritiene che seguendo un approccio di controllo di alto livello che disaccoppia i problemi di attuazione e controllo di volo, è possibile identificare algoritmi generali che possono essere impiegati in più piattaforme. Ad esempio, questo approccio potrebbe consentire ai ricercatori di sviluppare nuovi algoritmi per il volo acrobatico impiegando quadrirotori da 19 grammi che potrebbero essere successivamente implementati su uno da 95 milligrammi, Ape a quattro ali+.
"Questo è rilevante perché man mano che i volantini robotici diventano più piccoli, diventano anche più difficili da fabbricare, più difficile da maneggiare e più costoso, " Disse Perez-Arancibia. "Di conseguenza, come mostrato nel nostro documento, il fatto che lo stesso approccio possa essere impiegato per sintetizzare controller per piattaforme con differenze di peso fino a due ordini di grandezza è significativo e rilevante sia dal punto di vista della ricerca che da quello pratico".
Nel futuro, l'approccio introdotto da questo team di ricercatori dell'USC potrebbe informare la progettazione e l'implementazione di nuovi controller per microrobot simili a insetti. Inoltre, nei prossimi mesi, Perez-Arancibia e i suoi colleghi lavoreranno su un progetto diverso volto a creare il primissimo insetto artificiale volante sub-grammo completamente autonomo.
"Attualmente, la principale limitazione che ha impedito ai microrobotici di raggiungere un volo autonomo su scala inferiore al grammo è la densità di energia estremamente bassa delle batterie elettriche, "Perez-Arancibia ha detto. "Raggiungeremo l'autonomia impiegando muscoli artificiali alimentati da reazioni catalitiche".
© 2019 Scienza X Rete