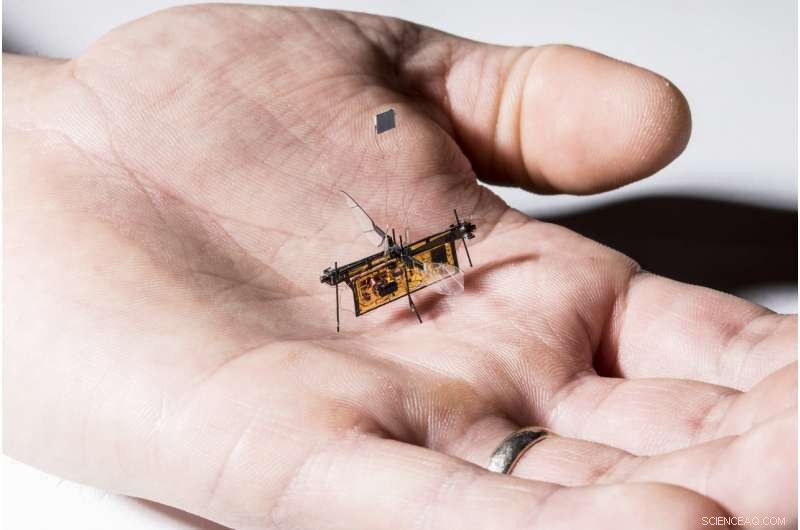
RoboFly, il primo robot volante wireless delle dimensioni di un insetto, è leggermente più pesante di uno stuzzicadenti. Credito:Mark Stone/Università di Washington
I robot volanti delle dimensioni di un insetto potrebbero aiutare con attività che richiedono tempo come il rilevamento della crescita dei raccolti nelle grandi aziende agricole o l'individuazione di fughe di gas. Questi robot si librano sbattendo piccole ali perché sono troppo piccoli per usare le eliche, come quelli visti sui loro cugini droni più grandi. Le dimensioni ridotte sono vantaggiose:questi robot sono economici da realizzare e possono facilmente scivolare in spazi ristretti inaccessibili ai grandi droni.
Ma gli attuali robo-insetti volanti sono ancora legati al suolo. L'elettronica di cui hanno bisogno per alimentare e controllare le loro ali è troppo pesante per essere trasportata da questi robot in miniatura.
Ora, gli ingegneri dell'Università di Washington hanno per la prima volta tagliato il cordone e aggiunto un cervello, permettendo al loro RoboFly di prendere i suoi primi flap indipendenti. Questo potrebbe essere un piccolo lembo per un robot, ma è un passo da gigante per i robot. Il team presenterà i suoi risultati il 23 maggio alla Conferenza internazionale sulla robotica e l'automazione a Brisbane, Australia.
RoboFly è leggermente più pesante di uno stuzzicadenti ed è alimentato da un raggio laser. Utilizza un minuscolo circuito di bordo che converte l'energia laser in elettricità sufficiente per azionare le sue ali.
"Prima di adesso, il concetto di robot volanti senza fili delle dimensioni di un insetto era fantascienza. Saremmo mai in grado di farli funzionare senza bisogno di un cavo?" ha detto il co-autore Sawyer Fuller, un assistente professore presso il Dipartimento di Ingegneria Meccanica UW. "Il nostro nuovo RoboFly wireless mostra che sono molto più vicini alla vita reale."
La sfida ingegneristica è lo sbattimento. Il battito delle ali è un processo assetato di potere, e sia la fonte di alimentazione che il controller che dirige le ali sono troppo grandi e ingombranti per salire a bordo di un minuscolo robot. Quindi il precedente robo-insetto di Fuller, il RoboBee, aveva un guinzaglio:riceveva potenza e controllo tramite i cavi da terra.
Ma un robot volante dovrebbe essere in grado di funzionare da solo. Fuller e il team hanno deciso di utilizzare uno stretto raggio laser invisibile per alimentare il loro robot. Hanno puntato il raggio laser su una cella fotovoltaica, che è attaccato sopra RoboFly e converte la luce laser in elettricità.
"Era il modo più efficiente per trasmettere rapidamente molta potenza a RoboFly senza aggiungere molto peso, " ha detto il co-autore Shyam Gollakota, un professore associato presso la Paul G. Allen School of Computer Science &Engineering dell'UW.
Ancora, il laser da solo non fornisce abbastanza tensione per muovere le ali. Ecco perché il team ha progettato un circuito che ha aumentato i sette volt in uscita dalla cella fotovoltaica fino ai 240 volt necessari per il volo.

Per alimentare RoboFly gli ingegneri hanno puntato un raggio laser invisibile (mostrato qui in laser rosso) su una cella fotovoltaica, che è attaccato sopra il robot e converte la luce laser in elettricità. Credito:Mark Stone/Università di Washington
Per dare a RoboFly il controllo delle proprie ali, gli ingegneri hanno fornito un cervello:hanno aggiunto un microcontrollore allo stesso circuito.
"Il microcontrollore si comporta come il cervello di una vera mosca che dice ai muscoli delle ali quando sparare, " ha detto il co-autore Vikram Iyer, uno studente di dottorato presso il Dipartimento di Ingegneria Elettrica UW. "Su RoboFly, dice alle ali cose come 'sbatti forte ora' o 'non sbattere.'"
Nello specifico, il controller invia la tensione in onde per imitare il battito delle ali di un vero insetto.
"Usa gli impulsi per modellare l'onda, "ha detto Johannes James, l'autore principale e uno studente di dottorato in ingegneria meccanica. "Per far sbattere le ali in avanti rapidamente, invia una serie di impulsi in rapida successione e poi rallenta gli impulsi man mano che ci si avvicina alla sommità dell'onda. E poi lo fa al contrario per far sbattere le ali dolcemente nell'altra direzione".

Per rendere RoboFly wireless, gli ingegneri hanno progettato un circuito flessibile (giallo) con un convertitore boost (bobina di rame e scatole nere a sinistra) che aumenta i sette volt provenienti dalla cella fotovoltaica nei 240 volt necessari per il volo. Questo circuito ha anche un cervello a microcontrollore (riquadro quadrato nero in alto a destra) che consente a RoboFly di controllare le sue ali. Credito:Mark Stone/Università di Washington
Per adesso, RoboFly può solo decollare e atterrare. Una volta che la sua cella fotovoltaica è fuori dalla linea di vista diretta del laser, il robot si esaurisce e atterra. Ma il team spera di essere presto in grado di guidare il laser in modo che RoboFly possa librarsi e volare in giro.
Mentre RoboFly è attualmente alimentato da un raggio laser, le versioni future potrebbero utilizzare minuscole batterie o raccogliere energia dai segnali a radiofrequenza, ha detto Gollakota. Quel modo, la loro fonte di alimentazione può essere modificata per compiti specifici.
Future RoboFlies può anche aspettarsi cervelli e sistemi di sensori più avanzati che aiutino i robot a navigare e completare le attività da soli, ha detto Fuller.
"Mi piacerebbe molto farne uno che trovi perdite di metano, " disse. "Potresti comprarne una valigia piena, aprilo, e voleranno intorno al tuo edificio alla ricerca di pennacchi di gas che escono da tubi che perdono. Se questi robot possono facilitare la ricerca di perdite, avranno molte più probabilità di essere rattoppati, che ridurrà le emissioni di gas serra. Questo è ispirato da mosche vere, che sono davvero bravi a volare in giro alla ricerca di cose puzzolenti. Quindi pensiamo che questa sia una buona applicazione per il nostro RoboFly."