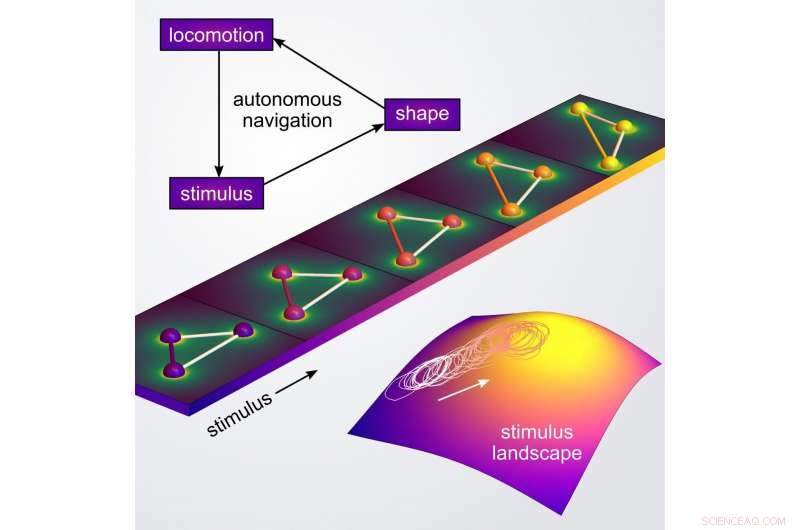
Uno schema di un meccanismo di navigazione autonomo tramite il cambiamento di forma Credito:Yong Dou/Columbia Engineering
La maggior parte dei materiali sintetici, compresi quelli negli elettrodi della batteria, membrane polimeriche, e catalizzatori, si degradano nel tempo perché non hanno meccanismi di riparazione interni. Se potessi distribuire microrobot autonomi all'interno di questi materiali, quindi potresti usare i microrobot per effettuare continue riparazioni dall'interno. Un nuovo studio dal laboratorio di Kyle Bishop, professore associato di ingegneria chimica, propone una strategia per robot su microscala in grado di rilevare i sintomi di un difetto materiale e navigare autonomamente nel sito del difetto, dove possono essere eseguite azioni correttive. Lo studio è stato pubblicato su Ricerca sulla revisione fisica 2 dicembre 2019.
I batteri del nuoto cercano regioni ad alta concentrazione di nutrienti integrando sensori chimici e motori molecolari, proprio come un'auto a guida autonoma che utilizza le informazioni provenienti da telecamere e altri sensori per selezionare un'azione appropriata per raggiungere la sua destinazione. I ricercatori hanno cercato di imitare questi comportamenti utilizzando piccole particelle spinte da combustibili chimici o altri input energetici. Mentre le variazioni spaziali nell'ambiente (ad es. nella concentrazione di carburante) può agire per orientare fisicamente la particella e quindi dirigere il suo movimento, questo tipo di navigazione ha dei limiti.
"Le particelle semoventi esistenti sono più simili a un treno in corsa guidato meccanicamente dalle rotaie tortuose che a un'auto a guida autonoma guidata autonomamente da informazioni sensoriali, " dice Bishop. "Ci siamo chiesti se potevamo progettare robot su microscala con sensori di materiale e attuatori che navigano più come i batteri".
Il team di Bishop sta sviluppando un nuovo approccio per codificare la navigazione autonoma dei microrobot che si basa su materiali che cambiano forma. Caratteristiche locali dell'ambiente, come la temperatura o il pH, determinare la forma tridimensionale della particella, che a sua volta influenza il suo moto semovente. Controllando la forma della particella e la sua risposta ai cambiamenti ambientali, i ricercatori modellano come i microrobot possono essere progettati per nuotare su o giù per i gradienti di stimolo, anche quelli troppo deboli per essere sentiti direttamente dalla particella.
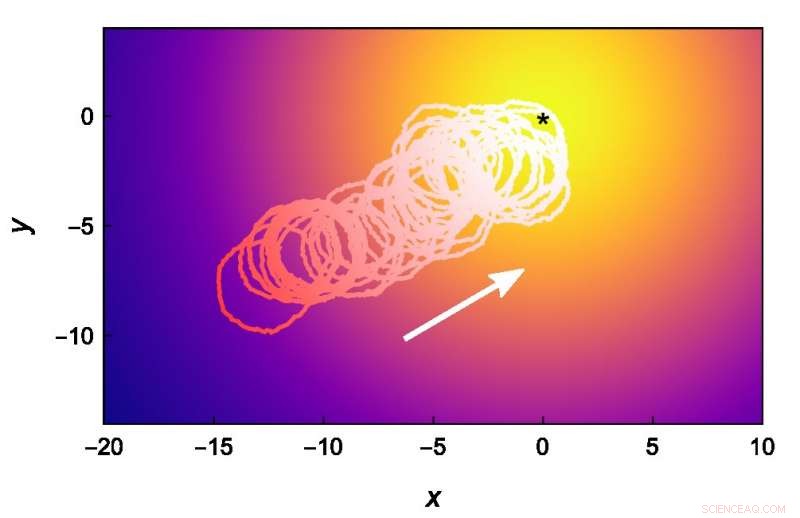
Traiettoria di navigazione simulata in ambienti rumorosi e complessi. Credito:Yong Dou/Columbia Engineering
"Per la prima volta, mostriamo come i materiali reattivi potrebbero essere utilizzati come computer di bordo per robot in microscala, più piccolo dello spessore di un capello umano, programmati per navigare in autonomia, " dice Yong Dou, un coautore dello studio e un dottorato di ricerca. studente nel laboratorio di Bishop. "Tali microrobot potrebbero svolgere compiti più complessi come il rilevamento distribuito dei difetti dei materiali, consegna autonoma di carichi terapeutici, e riparazioni su richiesta di materiali, cellule, o tessuti."
Il team di Bishop sta ora allestendo esperimenti per dimostrare in pratica la loro strategia di navigazione teorica per i microrobot, utilizzando materiali che cambiano forma come elastomeri a cristalli liquidi e leghe a memoria di forma. Si aspettano di dimostrare che gli esperimenti dimostreranno che gli stimoli reattivi, Le microparticelle che cambiano forma possono utilizzare il feedback ingegnerizzato tra il rilevamento e il movimento per navigare autonomamente.