Il robot alimentato da LeRop al lavoro. Credito:Kang et al.
Scattare fotografie di buona qualità può essere un compito impegnativo, poiché in genere richiede la ricerca di posizioni ideali, angoli e condizioni di luce. Sebbene le immagini artistiche siano state finora scattate principalmente da fotografi umani, negli ultimi anni, alcuni ricercatori hanno iniziato a studiare la possibilità di scattare foto automaticamente utilizzando i robot.
A tal fine, un team di ricercatori della Purdue University e Adobe Research ha recentemente sviluppato un nuovo framework che consente a un robot di catturare automaticamente fotografie di esseri umani, specificamente ritratti. Questo quadro, presentato in un articolo prepubblicato su arXiv, fa in modo che i robot seguano un utente umano in un punto ideale e poi gli scattino una foto.
LeRop, il quadro sviluppato dai ricercatori, è stato specificamente progettato per scattare ritratti in interni di soggetti umani. Primo, il framework guida un robot verso una posizione favorevole o desiderata per scattare foto e quindi utilizza un modello di valutazione delle foto per proporre le migliori viste, così come il modello di apprendimento per rinforzo profondo (DRL) per regolare la posizione e l'orientamento del robot per garantire le migliori condizioni di illuminazione.
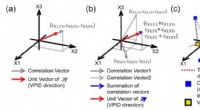
"Quando la composizione è attivata, il robot tenta di regolare la sua posizione per formare la vista che può corrispondere meglio all'immagine del modello data e infine scatta una fotografia, " hanno scritto i ricercatori nel loro articolo. "Un'immagine modello può essere prevista in modo dinamico utilizzando un modello di valutazione delle foto standard dal framework, o selezionato manualmente da un set predefinito dall'utente."
LeRop è un framework interattivo, poiché gli utenti possono programmarlo per seguire un obiettivo nel punto in cui desidera catturare una fotografia. Una volta che l'utente raggiunge quel punto, il robot inizia a cercare la vista migliore da catturare. Il componente DRL di LeRop è ciò che alla fine gli consente di regolare il suo punto di vista in base a come corrisponde alle immagini del modello.
I ricercatori hanno deciso di dotare il robot di una fotocamera a 360 gradi e di una fotocamera principale di alta qualità, in quanto ciò gli consente di avere una visione completa dell'ambiente circostante in ogni momento senza ruotare continuamente o passare a punti di vista diversi. interessante, il quadro ha una struttura modulare, il che significa che tutti i suoi modelli possono essere sostituiti o adattati in base alle esigenze dell'utente.
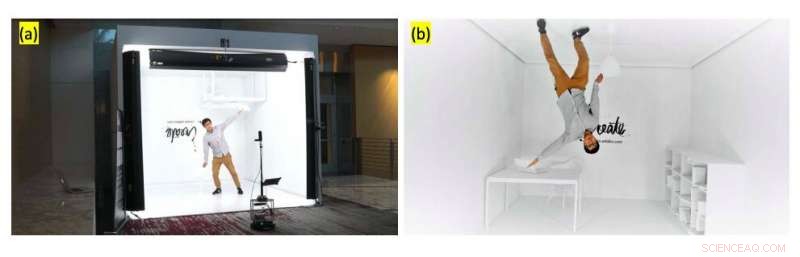
Il team ha valutato LeRop in una serie di test di prova su tre scene in interni, integrandolo all'interno di un semplice robot chiamato Turtlebot. Il robot ha scattato 20 fotografie di un utente umano in ciascuna di queste tre impostazioni, 10 con un modello predefinito e 10 utilizzando modelli che ha generato dinamicamente.
Il numero medio di regolazioni effettuate dal robot è stato di 11,20 per i modelli predefiniti e 12,76 per quelli generati dinamicamente. Inoltre, utilizzando il quadro dei ricercatori, il robot poteva scattare foto in un tempo medio di 22,11 secondi utilizzando modelli predefiniti e 22,40 secondi utilizzando modelli generati dinamicamente.
Il framework LeRop potrebbe essere un primo passo verso la creazione di un efficiente sistema di fotografia robotica in grado di scattare ritratti di alta qualità in modo rapido e automatico. Però, il sistema sviluppato dai ricercatori presenta ancora una serie di limitazioni che potrebbero impedirne l'adozione su larga scala. Ad esempio, finora, ha una potenza di calcolo a bordo limitata, e quindi funziona solo su un potente computer remoto.
Inoltre, i ricercatori finora l'hanno integrato solo all'interno di Turtlebot, che è un semplice robot con pochissimi gradi di libertà. Nei loro prossimi lavori, vorrebbero testare il loro sistema su un robot più complesso con più gradi di libertà.
"Il nostro sistema attualmente supporta solo un ritratto di una sola persona, " I ricercatori hanno scritto. "Le nuove politiche dovrebbero essere riqualificate per ottenere un migliore supporto per scattare foto di gruppo. Nel lavoro futuro, vorremmo anche testare diversi modelli estetici di valutazione delle foto ed estendere il lavoro alle scene all'aperto."
© 2019 Scienza X Rete