Non lasciarlo cadere:una pinza robot convenzionale al lavoro. Credito:Shutterstock
Con l'aiuto dell'apprendimento automatico, I ricercatori dell'ETH hanno sviluppato un sensore tattile nuovo ma a basso costo. Il sensore misura la distribuzione della forza ad alta risoluzione e con grande precisione, consentendo ai bracci del robot di afferrare oggetti sensibili o fragili.
Gli esseri umani non hanno problemi a raccogliere oggetti fragili o scivolosi con le mani. Il nostro senso del tatto ci fa sentire se abbiamo una presa salda sull'oggetto o se sta per scivolare tra le nostre dita, così possiamo regolare di conseguenza la forza della nostra presa. Anche i bracci di presa del robot incaricati di raccogliere oggetti fragili o scivolosi o con una superficie complessa richiedono questo tipo di feedback.
I ricercatori di robotica dell'ETH di Zurigo hanno ora sviluppato un sensore tattile che potrebbe tornare utile proprio in un caso del genere e segna quello che considerano un passo significativo verso la "pelle robotica". Il design estremamente semplice del sensore lo rende poco costoso da produrre, come sottolineano gli ingegneri. Essenzialmente, è costituito da una "pelle" elastica in silicone con microsfere di plastica colorate e una normale fotocamera fissata sul lato inferiore.
Misurazioni utilizzando un ingresso puramente ottico
Il sensore è basato sulla visione:quando entra in contatto con un oggetto, appare una rientranza nella pelle di silicone. Questo cambia il modello delle microsfere, che viene registrato dall'obiettivo fisheye sul lato inferiore del sensore. Da quelle modifiche al modello, è possibile calcolare la distribuzione della forza sul sensore.
"I sensori convenzionali registrano la forza applicata in un solo punto. Al contrario, la nostra pelle robotica ci permette di distinguere tra diverse forze che agiscono sulla superficie del sensore, e calcolarli con alti gradi di risoluzione e accuratezza, Dice Carlo Sferrazza. È dottorando nel gruppo guidato da Raffaello D'Andrea, Professore di Sistemi Dinamici e Controllo all'ETH di Zurigo. "Possiamo anche determinare la direzione da cui agisce una forza, " dice Sferrazza. In altre parole, i ricercatori possono identificare non solo le forze che esercitano una pressione verticale sul sensore, ma anche forze di taglio, che agiscono lateralmente.

Il prototipo del sensore tattile. Credito:ETH Zurigo
Sviluppo basato sui dati
Per calcolare quali forze spingono le microsfere in quali direzioni, gli ingegneri utilizzano una serie completa di dati sperimentali:nei test che sono stati standardizzati attraverso il controllo della macchina, hanno esaminato una varietà di diversi tipi di contatto con il sensore. Sono stati in grado di controllare con precisione e variare sistematicamente la posizione del contatto, la distribuzione della forza e la dimensione dell'oggetto che entra in contatto. Con l'aiuto dell'apprendimento automatico, i ricercatori hanno registrato diverse migliaia di casi di contatto e li hanno abbinati con precisione ai cambiamenti nel modello del tallone.
Il prototipo di sensore più sottile che i ricercatori hanno costruito finora ha uno spessore di 1,7 centimetri e copre una superficie di misurazione di 5 x 5 centimetri. Però, i ricercatori stanno lavorando utilizzando la stessa tecnica per realizzare superfici di sensori più grandi dotate di diverse fotocamere, e può quindi riconoscere anche oggetti di forma complessa. Inoltre, mirano a rendere il sensore più sottile:ritengono che sia possibile ottenere uno spessore di soli 0,5 centimetri utilizzando la tecnologia esistente.
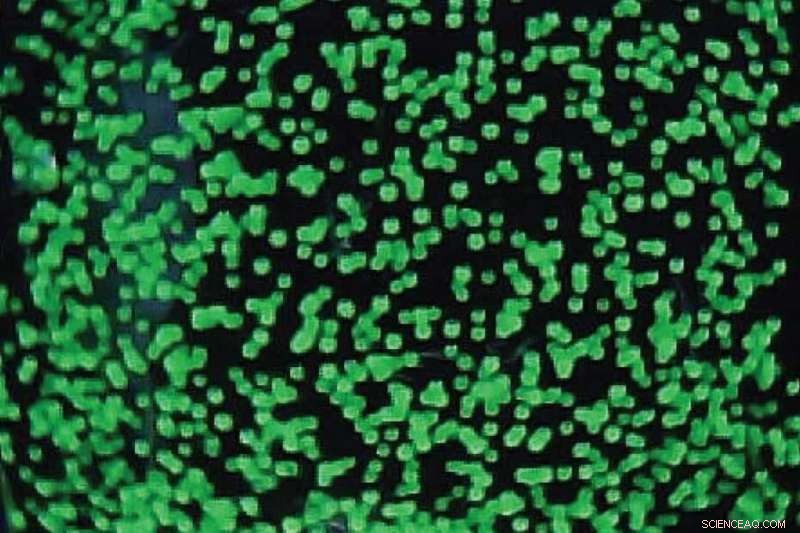
Microsfere sul lato inferiore della pelle di silicone. Una telecamera registra come si muovono quando una forza agisce su di loro. Credito:ETH Zurigo

Misurazioni automatizzate. Credito:Sferrazza C et al. Accesso IEEE 2019
Robotica, sport e realtà virtuale
Poiché il silicone elastico è antiscivolo e il sensore può misurare le forze di taglio, è particolarmente adatto per l'uso nei bracci di presa del robot. "Il sensore riconoscerebbe quando un oggetto minaccia di sfuggire alla presa del braccio in modo che il robot possa regolare la sua forza di presa, " spiega Sferrazza.
I ricercatori potrebbero anche utilizzare un tale sensore per testare la durezza dei materiali o per mappare digitalmente i tocchi. Se integrato in dispositivi indossabili, i ciclisti potrebbero misurare quanta forza stanno applicando alla bici attraverso i pedali, o i corridori potrebbero misurare la forza che entra nelle loro scarpe quando fanno jogging. Infine, tali sensori possono fornire informazioni importanti per lo sviluppo di feedback tattili, ad esempio per i giochi di realtà virtuale.